Πληροφορίες
Η ομάδα ρομποτικής του σχολείου μας “2ο ΕΠΑΛ / ΕΚ Αγρινίου” προτείνει ένα σύστημα ανακύκλωσης μέσω του οποίου θα μπορούμε να κάνουμε καλύτερη διαλογή των υλικών. Η πρότασή μας είναι η εξής: Να διαχωρίζεται το χαρτί από τα υπόλοιπα ανακυκλώσιμα υλικά (μέταλλο, γυαλί, πλαστικό) που συλλέγονται στους γνωστούς μπλε κάδους και να μπει σε τρίτο κάδο π.χ. καφέ.
Η υλοποίηση που προτείνουμε περιλαμβάνει ένα σύστημα διαλογής των υλικών που θα συλλέγονται στους μπλε κάδους, οι οποίοι θα περιέχουν πια μέταλλο, γυαλί και πλαστικό.
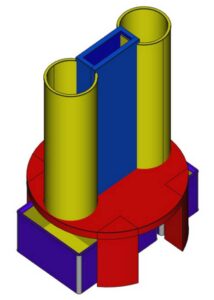
Θα δημιουργηθεί από ένα 3d εκτυπωτή ένας “πύργος” μέσα στον οποίο θα μπαίνουν τα υλικά. Στην πορεία τους προς τα κάτω θα περνούν μπροστά από αισθητήρες και με τη χρήση κινητήρων θα οδηγούνται στους κάδους. Έτσι :
- θα εντοπίζονται τα μέταλλα και θα διαχωρίζονται στο πρώτο κάδο.
- στην συνέχεια το γυαλί θα τοποθετείται σε δεύτερο κάδο.
- το υλικό που θα περισσέψει θα είναι το πλαστικό, όπου και αυτό με τη σειρά του θα τοποθετείται σε ξεχωριστό κάδο.
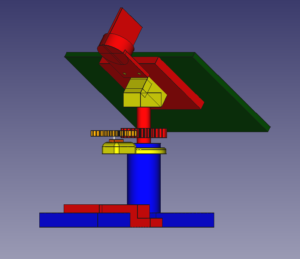
Όλη η κατασκευή υποστηρίζεται ενεργειακά από έναν Solar tracker ο οποίος κινεί φωτοβολταϊκό το οποίο:
- θα ακολουθεί τη πορεία του ήλιου
- όταν νυχτώσει θα επιστρέφει στην ανατολή για να είναι έτοιμος την επόμενη ημέρα
- όλα τα μέρη έχουν εκτυπωθεί από 3d εκτυπωτή
Ηλεκτρονικά
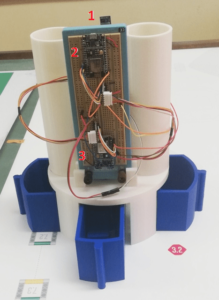
Υπάρχουν δύο μικροελεγκτές ανοιχτού λογισμικού και υλικού οι οποίοι είναι βασισμένοι σε ένα ολοκληρωμένο κύκλωμα το οποίο αποκαλείται ESP8266.
Ο ένας είναι master (κάτω) και ο άλλος slave (πάνω). Επικοινωνούν μεταξύ τους μέσω wifi το οποίο υλοποιεί ο master.
Η επιλογή του πλήθους έγινε γιατί ένας μικροελεγκτής δεν μπορούσε να χειριστεί όλα τα περιφερειακά (αισθητήρες – κινητήρες)
Έχουμε :
- Αισθητήρας κίνησης (Συνδέεται με τον πάνω (slave) μικροελεγκτή και χρησιμοποιείται για τον εντοπισμό του αντικειμένου που πρόκειται να μπει στη διαλογή. Από το “σήμα” του ξεκινάει η διαδικασία διαλογής)
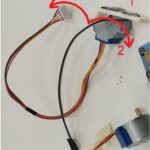
- Πάνω (slave) μικροελεγκτής (Όταν λάβει “σήμα” από τον αισθητήρα κίνησης παίρνει μέτρηση (1) ελέγχοντας το υλικό που εντοπίστηκε αν είναι μέταλλο. Αν είναι μέταλλο τότε ο κινητήρας (2) κινείται αριστερόστροφα οδηγώντας το μέταλλο στο κατάλληλο κάδο. Αν το υλικό δεν είναι μέταλλο τότε ο κινητήρας κινείται δεξιόστροφα οδηγώντας το υλικό για περαιτέρω διαλογή στέλνοντας παράλληλα σήμα στο κάτω (master) μικροελεγκτή.)
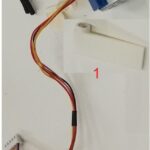
- Κάτω (master) μικροελεγκτής ( Και εδώ υπάρχει ανάλογο σύστημα (1). Όταν ο μικροελεγκτής λάβει “σήμα” από τον πάνω (slave) παίρνει μέτρηση από ένα αισθητήρα φωτός ελέγχοντας το υλικό. Αν είναι γυαλί, (περνάει το φως) τότε ο κινητήρας (2) κινείται αριστερόστροφα οδηγώντας το γυαλί στο κατάλληλο κάδο. Αν το υλικό δεν είναι γυαλί τότε ο κινητήρας (2) κινείται δεξιόστροφα οδηγώντας το υλικό που είναι το πλαστικό στο τελευταίο κάδο.

Φωτογραφίες από την κατασκευή
Solar Tracker




Διαλογή