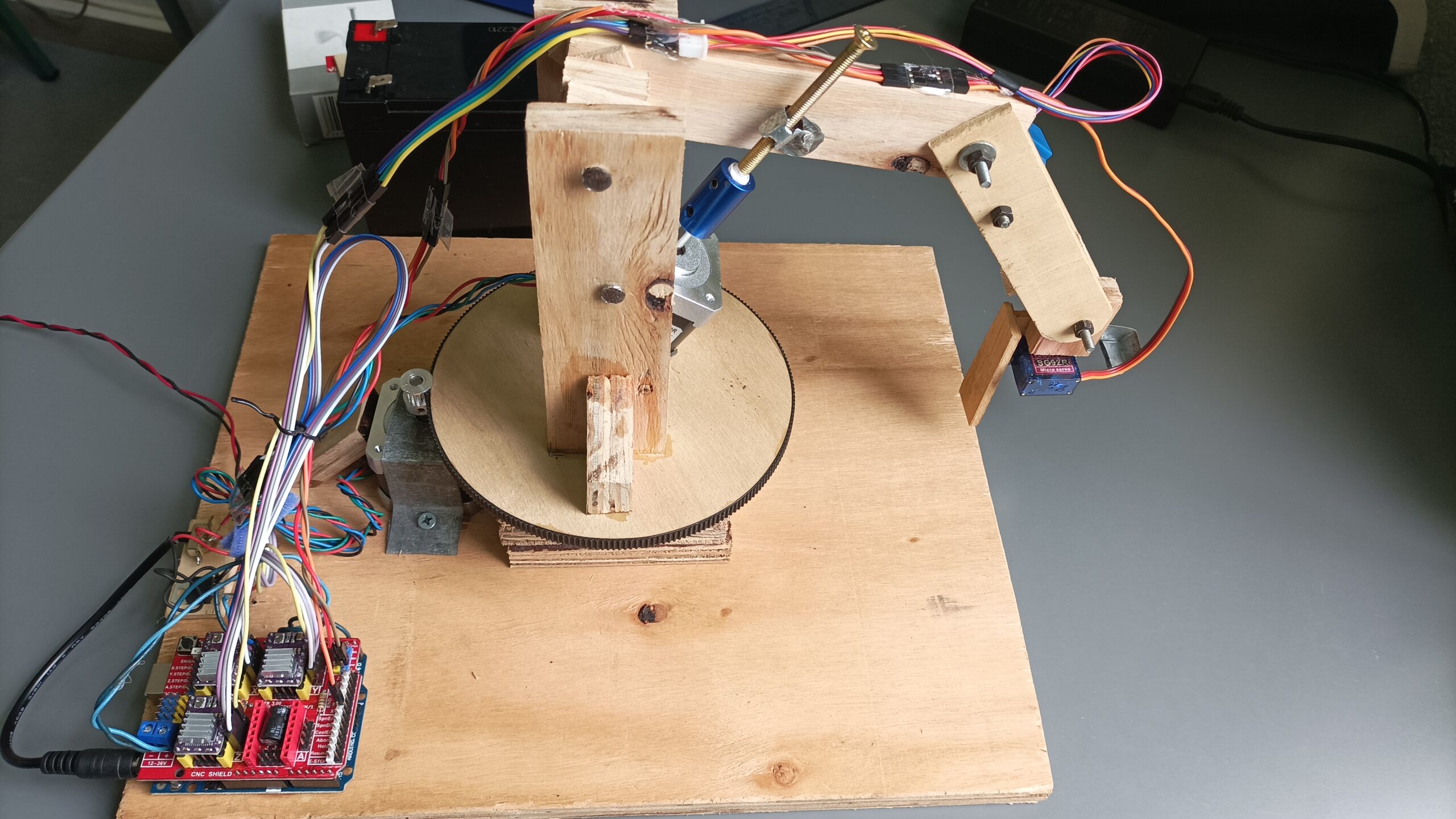
Στην εργασία αυτή προσπαθήσαμε και κατασκευάσαμε ένα βιομηχανικό ρομποτικό Βραχίονα, όπως συνηθίζουμε με απλά και ανακυκλώσιμα υλικά που βρίσκουμε και διαμορφώνουμε εμείς.
Τα υλικά μας συνήθως είναι ξύλα χαρτόνια μοριοσανίδες. Βέβαια τα ηλεκτρονικά εξαρτήματα αγοράζονται από το εμπόριο.
Με την κατασκευή αυτή μετατοπίζουμε ένα αντικείμενο από μια θέση Α σε μια άλλη διαφορετική θέση Β.
Η μετατόπιση και ο έλεγχος γίνεται με την βοήθεια μικροελεκτή arduino, τον οποίο προγραμματίσαμε αυτή την φορά με την βοήθεια της τεχνητής νοημοσύνης της OPENAI.
Το πρόγραμμα ελέγχου και τα υλικά είναι εδώ: https://github.com/6geltrik/robotic-arm
Η λειτουργία και κατασκευή εδώ: https://youtu.be/30FNoW7F8ds