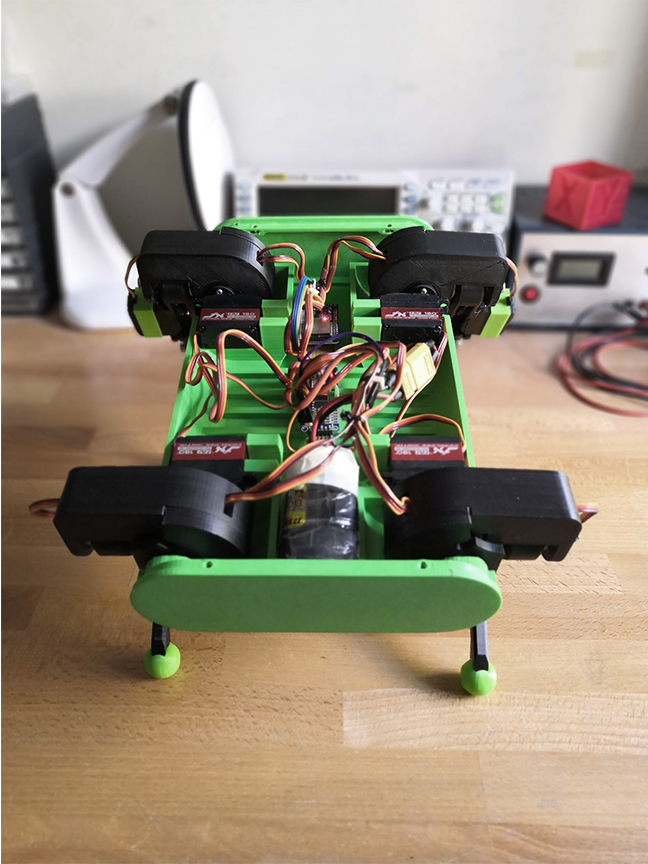
Η εργασία αφορά την περισυλλογή απορριμμάτων χρησιμοποιώντας ένα ευέλικτο τετράποδο ρομπότ, με την ικανότητα να εντοπίζει σκουπίδια μέσω κάμερας (machine learning). Ο σχεδιασμός των κινητήρων του, του επιτρέπει να διανύει δύσβατες περιοχές, όπως δάση, χωματερές, λόφους με ελάχιστη δυσκολία, σε σύγκριση με ρομπότ που βασίζονται σε ρόδες. Η ικανότητα του να εντοπίζει αντικείμενα (πλαστικά μπουκάλια, κουτάκια αναψυκτικών, φύλλα δέντρων) και η βασική αίσθηση χώρου που διαθέτει, κάνει το ρομπότ ευέλικτο σε άγνωστα περιβάλλοντα. Προορίζεται για τον αυτοματοποιημένο καθαρισμό περιοχών, τις οποίες άνθρωπος αδιαφορεί να διατηρήσει καθαρές, όπως δάση, πεζοδρόμια και χώρους αναψυχής.
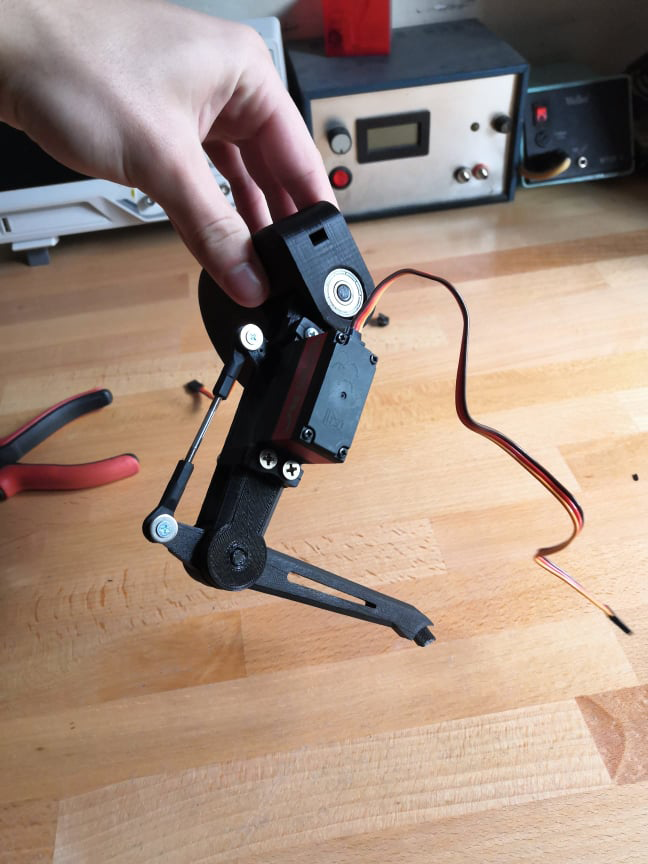
Επίδειξη κινιματικού μοντέλου
Επίδειξη αναγνώρισης αντικειμένων
Υλικά & Εργαλεία
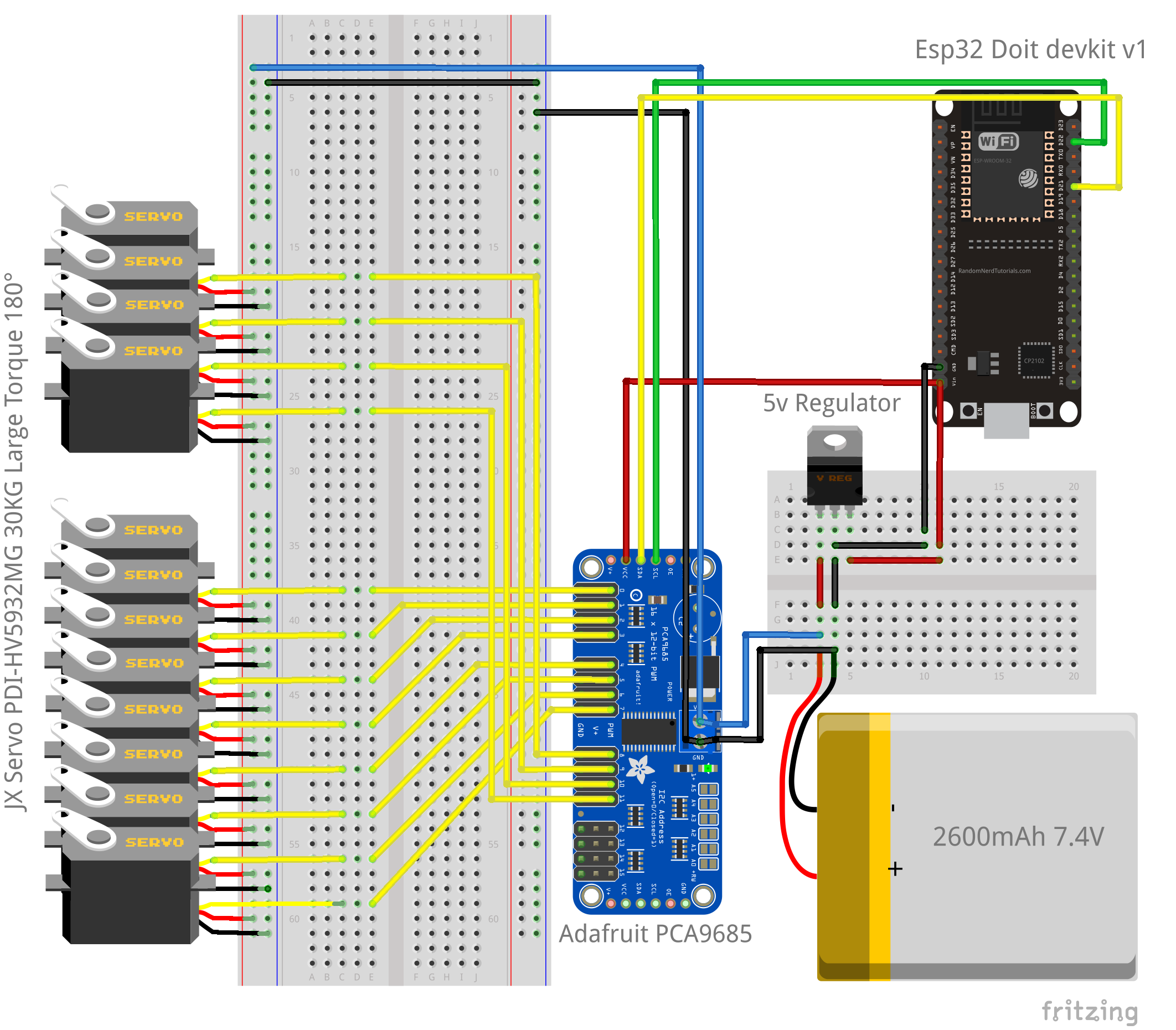
1x Esp32 ή Arduino.
1x Sipeed M1 Dock - K210 Development Board
1x PCA9685 16-Channel 12-bit PWM Servo Motor Driver I2C Module
1x 7805 TO-2205V - 1.5A Linear Voltage Regulator
1x Li-Po Battery 7.4V 2600mAh
12x JX Servo PDI-HV5932MG 30KG Large Torque 180°
8x 626zz Ρουλεμάν 6x19x6mm
4x 6900zz Ρουλεμάν 10x22x6mm
4x M3 Adjustable Push Rod End Ball Joint Linkage
Διάφορες M3,M4,M5 βίδες & παξιμάδια
- 3D εκτυπωτής
- Ηλεκτρονικό κολλητήρι
- Τροφοδοτικό
- Παλμογράφος
- Διάφορα Εργαλεία (κατσαβίδια, πένσα, κόφτης, κοπίδι)
Προσομοίωση
Μηχανισμός

Ηλεκτρονικά
Τεχνητή Όραση
 Την τεχνητή όραση αναλαμβάνει ο Kendryte 210 που επικοινωνεί μέσο UART με τον Esp32 – ο οποίος τρέχει τον κώδικα κίνησης του ρομπότ. Με το παρόν σύστημα μπορεί να γίνει ακριβείς αναγνώριση της θέσης ορισμένων σχεδίων με το όνομα AprilTags και επίσης ακριβείς αναγνώριση αντικειμένων(μπουκάλια, κουτιά αναψυκτικών) που όμως η πληροφορία της θέσης τους στον χώρο είναι περιορισμένη.
Την τεχνητή όραση αναλαμβάνει ο Kendryte 210 που επικοινωνεί μέσο UART με τον Esp32 – ο οποίος τρέχει τον κώδικα κίνησης του ρομπότ. Με το παρόν σύστημα μπορεί να γίνει ακριβείς αναγνώριση της θέσης ορισμένων σχεδίων με το όνομα AprilTags και επίσης ακριβείς αναγνώριση αντικειμένων(μπουκάλια, κουτιά αναψυκτικών) που όμως η πληροφορία της θέσης τους στον χώρο είναι περιορισμένη.
Τα στάδια της κατασκευής




Περισσότερες πληροφορίες στο αποθετήριο του GitHub.
