Σκοπός της ομάδας μας είναι να φτιάξουμε ένα ρομπότ που θα χορεύει όταν ακούει μουσική . Ο χορός που επιλέξαμε να κάνει είναι το floss dance!
H χρησιμότητα της κατασκευής μας αφορά φυσικά τη διασκέδαση. Μπορεί να χρησιμοποιηθεί σαν εφέ σε κέντρα διασκέδασης (bars, clubs, κ.α.) , σε πάρτυ (όπως αυτό του σχολείου μας) και όπου αλλού χρειάζεται για να δώσει κέφι!
Η ομάδα αποτελείται από δέκα μαθητές του 4ου Γυμνασίου Καλαμάτας και απαρτίζεται από τρεις υποομάδες.
Χρησιμοποιούμε τον μικροελεγκτή Arduino uno , αισθητήρα ήχου , κινητήρες servo, απλά και φτηνά υλικά.
H διεύθυνση του αποθετηρίου μας στο github είναι: https://github.com/dikaloger/dancing-robotuino

08/04/2019
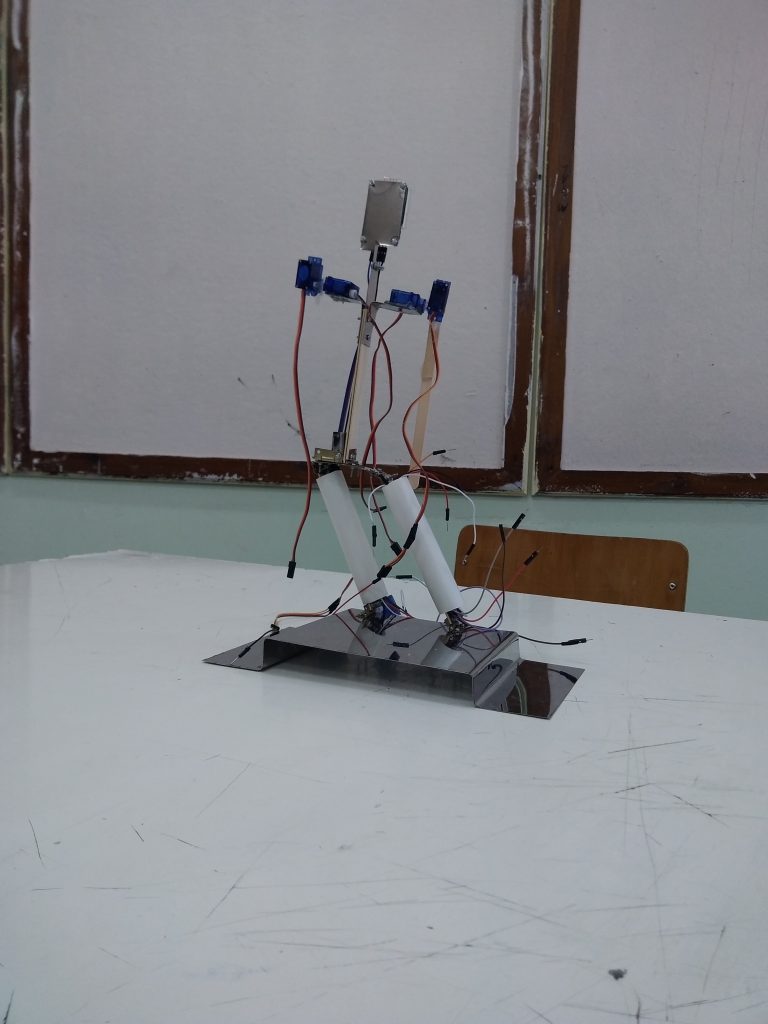
Ο βασικός σκελετός του robotuino είναι έτοιμος!
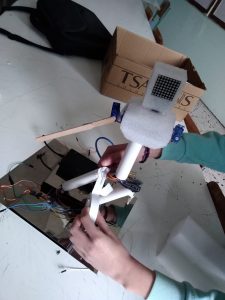
Το dancing robotuino σε δράση!
ΔΙΑΔΙΚΑΣΙΑ
ΤΑ ΥΛΙΚΑ ΠΟΥ ΑΠΑΙΤΟΥΝΤΑΙ ΕΙΝΑΙ:
- ΑΝΟΞΕΙΔΩΤΗ ΛΑΜΑΡΙΝΑ 0,4mm
- ΘΕΡΜΟΣΥΣΤΕΛΟΜΕΝΟ ΜΟΝΩΤΙΚΟ Φ4
- ΒΙΔΕΣ ΚΑΙ ΠΑΞΙΜΑΔΙΑ 2mm (30 ΤΕΜ.)
- SERVO ΡΟΜΠΟΤΙΚΗΣ (5 ΤΕΜ.)
- ΜΙΚΡΟΕΛΕΓΚΤΗΣ ARDUINO
- BREADBOARD
- ΑΙΣΘΗΤΗΡΑΣ ΗΧΟΥ
- ΚΑΛΩΔΙΑ
- ΜΟΝΩΤΙΚΗ ΤΑΙΝΙΑ
- ΞΥΛΑΚΙ ΠΑΓΩΤΟΥ
- ΓΛΩΣΣΟΠΙΕΣΤΡΑ (τα ξυλάκια που χρησιμοποιούν οι γιατροί για να δουν το στόμα μας)
- ΜΕΝΤΕΣΕΔΕΣ 2ΕΚ. (4 ΤΕΜ.)
- ΑΦΡΩΔΕΣ ΥΛΙΚΟ ΣΥΣΚΕΥΑΣΙΑΣ
- ΠΛΑΣΤΙΚΑ ΥΛΙΚΑ ΣΥΣΚΕΥΑΣΙΑΣ
- ΣΩΛΗΝΑΣ ΗΛΕΚΤΡΟΛΟΓΙΚΩΝ ΕΓΚΑΤΑΣΤΑΣΕΩΝ Φ25
ΤΑ ΕΡΓΑΛΕΙΑ ΠΟΥ ΑΠΑΙΤΟΥΝΤΑΙ ΕΙΝΑΙ:
- ΠΙΣΤΟΛΙ ΘΕΡΜΟΚΟΛΛΑΣ
- ΔΡΑΠΑΝΟ
- ΧΑΡΑΚΑΣ
- ΨΑΛΙΔΙ ΛΑΜΑΡΙΝΑΣ
- ΜΑΡΚΑΔΟΡΑΚΙ
- ΣΤΡΑΒΟΚΑΤΣΑΒΙΔΟ
- ΚΛΕΙΔΙ ΓΙΑ ΠΑΞΙΜΑΔΙ 4mm
- ΤΡΥΠΑΝΙ ΓΙΑ ΛΑΜΑΡΙΝΑ 2,5mm
- ΚΟΛΛΗΤΗΡΙ
- ΣΑΝΙΔΕΣ
- ΜΥΤΟΤΣΙΜΠΙΔΟ
Αρχικά κάμπτουμε τη λαμαρίνα της βάσης για να αποκτήσει τη μορφή που φαίνεται στη φωτογραφία.
Σημειώνουμε πως όλες οι κάμψεις της λαμαρίνας μπορούν να γίνουν χρησιμοποιώντας έναν πάγκο εργασίας ως τράπεζα

μια σανίδα που την πιέζουμε στον πάγκο ως σφιγκτήρα και το χέρι μας, ή, μια άλλη σανίδα ως καμπτήρα.

για μικρά κομμάτια λαμαρίνας οι κάμψεις μπορούν να γίνουν με μυτοτσίμπιδα

- Ανοίγουμε τρύπες στη λαμαρίνα της βασης με το δράπανο ώστε να βιδώσουμε τους μεντεσέδες.

- Ανοίγουμε τρύπες και στα γλωσσοπίεστρα έτσι ώστε να βιδώσουν με το άλλο φύλλο του μεντεσέ.
- Ανοίγουμε τρύπες σε λαμαρίνα 2×1 cm την οποία χρησιμοποιούμε ώστε να σφίξουν πάνω της τα παξιμάδια των βιδών που ενώνουν μεντεσέ , γλωσσοπίεστρο και λαμαρίνα για να μην υπάρχει ρήξη στο γλωσσοπίεστρο από τη διαδικασία του βιδώματος. Για το πόδι που κινείται από το servo η λαμαρίνα είναι 3×2 και έχει τη μορφή Γ. Οι μεντεσέδες παίζουν τον ρόλο του αστράγαλου. Περνάμε στα γλωσοπίεστρα σωλήνα ηλεκτρολογικών εγκαταστάσεων.
- Ανάλογη διαδικασία ακολουθείται και για τους γοφούς του ρομπότ. Τον ρόλο της λεκάνης τον παίζει μια λαμαρίνα 2×7 cm.
- Για το υπολογισμό των αναλογιών των μερών του σώματος του ρομπότ χρησιμοποιούμε το γνωστό σχέδιο «Άνθρωπος του Βιτρούβιου» του Da Vinci.

- Στο μέσο της λεκάνης συνδέουμε τον κορμό χρησιμοποιώντας δύο γλωσσοπίεστρα για σπονδυλική στήλη.
- Περνάμε σωλήνα ηλεκτρολογικών εγκαταστάσεων
- Στο πάνω μέρος της σπονδυλικής στήλης συνδέουμε αριστερά και δεξιά δύο τεμάχια λαμαρίνας 2×8 cm που έχουμε κάμψει σε μορφή Γ. Η σύνδεση γίνεται με βίδες όπως και προηγούμενα.
- Τα servo των ώμων κολλιούνται πάνω στη λαμαρίνα με θερμόκολλα και χρησιμεύουν για την κίνηση εμπρός-πίσω των χεριών.

Τα servo για την κίνηση αριστερά-δεξιά κολλιούνται με θερμόκολα πάνω στα horns των servo των ώμων.
- Ανάμεσα στα δύο τεμάχια λαμαρίνας μορφής Γ βιδώνουμε τεμάχιο λαμαρίνας διαμορφωμένο σε δύο κάθετα επίπεδα: το ένα με επιφάνεια 2×5 θα παίζει το ρόλο του λαιμού και το άλλο με επιφάνεια 3×5 θα χρειαστεί για τη σύνδεση του 8×8 led matrix. Σημειώνουμε πως ανάμεσα στο 8×8 led matrix και τη λαμαρίνα θα πρέπει να παρεμβληθεί μονωτικό σκληρό υλικό (χρησιμοποιήσαμε πλαστικό από χρησιμοποιημένη συσκευασία).
- Περνάμε τα καλώδια μέσα από τις σωλήνες ηλεκτρολογικών εγκαταστάσεων. Τυχόν επεκτάσεις καλωδίων συγκρατούνται στις συνδέσεις με θερμοσυστελλόμενο μονωτικό.
- Για τα χέρια χρησιμοποιούμε ξυλάκια παγωτού, κολλώντας τα πάνω στα horns.
- Καλύπτουμε τον κορμό, το κεφάλι και το λαιμό με αφρώδες υλικό συσκευασίας που έχουμε ψαλιδίσει κατάλληλα. Και τη λεκάνη με μονωτική ταινία.
- Για την αποφυγή βραχυκυκλώματος σε περίπτωση που ο μικροελεγκτής Arduino τοποθετηθεί πάνω σε αγώγιμη επιφάνεια, καλύπτουμε την κάτω πλευρά του με πλαστικό υλικό που κόψαμε από χρησιμοποιημένη συσκευασία

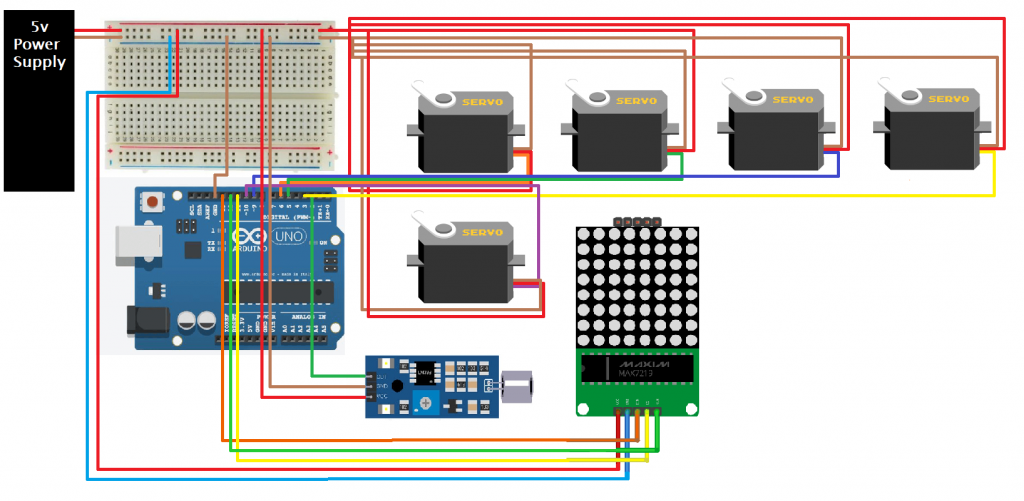
- Επειδή ή τάση λειτουργίας των servo είναι 4,8-6V συνεχούς και η μέγιστη ένταση του ρεύματος κατά τη λειτουργία του ρομπότ φτάνει σύμφωνα με τις μετρήσεις μας τα 3 Α (στις προδιαγραφές των servo αναφέρεται μέγιστη ένταση 0.8 Α ανά servo), για την τροφοδοσία των servo χρησιμοποιούμε κατάλληλο εξωτερικό τροφοδοτικό . Φροντίζουμε φυσικά το pin GND του μικροελεγκτή να ενωθεί με την τροφοδοσία ground των servo.
H συνδεσμολογία φαίνεται στο παρακάτω σχέδιο:
Τρόπος λειτουργίας:
Αρχικά το ρομπότ είναι ακίνητο και στο 8x8led matrix εμφανίζει ουδέτερο πρόσωπο . Ο κώδικας για το ουδέτερο πρόσωπο τροποποιήθηκε από μας διότι τοποθετούμε το 8×8 led matrix σε κατακόρυφη θέση. Όταν ο αισθητήρας ήχου λάβει ήχο που ξεπερνά κάποιο κατώφλι, το οποίο ρυθμίζουμε με το ποτενσιόμετρο που φέρει πάνω του, στέλνει σήμα στον μικροελεγκτή. Όταν τα σήματα αυτά επαναλαμβάνονται κατά ίσα χρονικά διαστήματα (ανοχή 0.03sec) που κυμαίνονται από 0,3 sec μέχρι 1sec, το 8×8 led matrix εμφανίζει χαρούμενο πρόσωπο (πάλι με κώδικα τροποποιημένο από μας) και τα servo αρχίζουν τις κινήσεις. Χρησιμοποιούμε πέντε servo:
servo1: δεξί πόδι (Η κίνηση του δεξιού ποδιού παρασύρει σε κίνηση τη λεκάνη και αυτή παρασύρει σε κίνηση το αριστερό πόδι)
servo2:κίνηση εμπρός- πίσω του αριστερού χεριού
servo3:κίνηση εμπρό-ς πίσω του δεξιού χεριού
servo4:κίνηση αριστερά-δεξιά του αριστερού χεριού
servo5:κίνηση αριστερά-δεξιά του δεξιού χεριού
Kοστολόγιο
- ΑΝΟΞΕΙΔΩΤΗ ΛΑΜΑΡΙΝΑ 0,4mm 2 €
- ΘΕΡΜΟΣΥΣΤΕΛΟΜΕΝΟ ΜΟΝΩΤΙΚΟ Φ4 1 €
- ΒΙΔΕΣ ΚΑΙ ΠΑΞΙΜΑΔΙΑ 2mm (30 ΤΕΜ.) 2 €
- SERVO ΡΟΜΠΟΤΙΚΗΣ SG90 (4 ΤΕΜ.) και ES08MA 9(1 TEM.) 26 €
- ΜΙΚΡΟΕΛΕΓΚΤΗΣ ARDUINO 7 €
- BREADBOARD 3 €
- ΑΙΣΘΗΤΗΡΑΣ ΗΧΟΥ 2 €
- ΚΑΛΩΔΙΑ (25ΤΕΜ.) 1, 37€
- ΜΟΝΩΤΙΚΗ ΤΑΙΝΙΑ 0.5 €
- ΞΥΛΑΚΙ ΠΑΓΩΤΟΥ 0,10 €
- ΓΛΩΣΣΟΠΙΕΣΤΡΑ (4 ΤΕΜ.) 0,5 €
- ΜΕΝΤΕΣΕΔΕΣ 2ΕΚ. (4 ΤΕΜ.) 0,4 €
- ΣΩΛΗΝΑ ΗΛΕΚΤΡΟΛΟΓΙΚΩΝ ΕΓΚΑΤΑΣΤΑΣΕΩΝ Φ25 (45cm) 0,25 €
- ΑΦΡΩΔΕΣ ΥΛΙΚΟ ΣΥΣΚΕΥΑΣΙΑΣ(επαναχρησιμοποιηση) ΔΩΡΕΑΝ
- ΠΛΑΣΤΙΚΟ ΕΛΑΣΜΑ ΣΥΣΚΕΥΑΣΙΑΣ(επαναχρησιμοποίηση) ΔΩΡΕΑΝ
ΣΥΝΟΛΟ 45,22€
Χρειάστηκε επίσης να αφιερώσουμε πάνω από τρακόσιες (300) εργατοώρες για να φτάσουμε σε αυτό το αποτέλεσμα και να λύσουμε όλα τα τεχνικά ζητήματα που αντιμετωπίσαμε, αφού η δημιουργία μας είναι εντελώς πρωτότυπη, και όλα αυτά γιατί είμαστε δυνατή, μερακλίδικη και επινοητική ομάδα!
Σύνθημά μας : ΔΕΝ ΥΠΑΡΧΟΥΝ ΤΕΧΝΙΚΑ ΠΡΟΒΛΗΜΑΤΑ ΑΛΛΑ ΤΕΧΝΙΚΑ ΖΗΤΗΜΑΤΑ, δηλαδή καταστάσεις που ζητούν από μας να κατανοήσουμε , να μάθουμε, να επινοήσουμε και να εφαρμόσουμε!
ΚΑΛΗ ΕΠΙΤΥΧΙΑ ΣΕ ΟΛΟΥΣ ΤΟΥΣ ΣΥΜΜΕΤΕΧΟΝΤΕΣ ΚΑΙ ΤΟΥΣ ΔΙΟΡΓΑΝΩΤΕΣ
Οι μαθητές της Γ’ τάξης του 4ου Γυμνασίου Καλαμάτας: Δημαρέσης Θοδωρής, Κόσσυφας Νεκτάριος, Γκούντι Ματίνα,Αθανασόπουλος Γιώργος, Κανουλά Ρεβέκκα, Κρίκα Νεκταρία, Κατσιμαγκλής Κωνσταντίνος, Κριαράς Κωνσταντίνος, Κουτάντος Γιώργος, Μαρμαράς Κωνσταντίνος και ο καθηγητής τους Δημήτρης Καλογερόπουλος ΠΕ80(Οικιακής Οικονομίας)
