
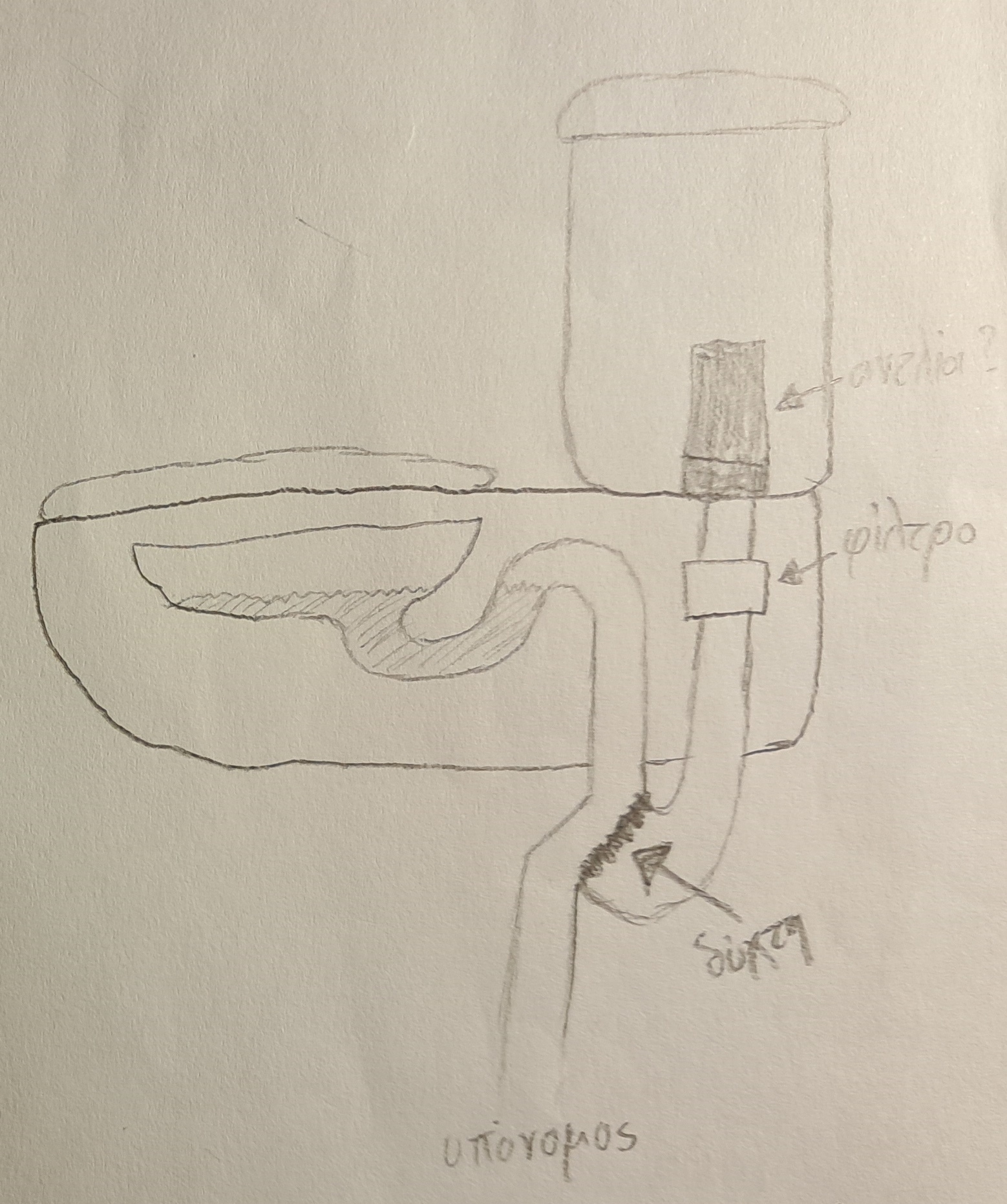
Εντοπίσαμε πως στις δημόσιες τουαλέτες υπάρχει υπερβολική κατανάλωση νερού από την βρύση και το καζανάκι. Γι’ αυτό σκεφτήκαμε να προτείνουμε έναν φτηνό τρόπο για να λυθεί το πρόβλημα. Το νερό της βρύσης να αξιοποιείται στο καζανάκι. Τα απόβλητα με ένα φίλτρο θα διαχωρίζονται και θα φεύγουν στο δίκτυο αποχέτευσης. Το υπόλοιπο νερό θα συγκεντρώνεται σε μια δεξαμενή η οποία θα περιέχει ειδικά χημικά φιλικά προς το περιβάλλον, θα καθαρίζεται, θα φιλτράρεται ξανά και θα διοχετεύεται στο καζανάκι. Σε περίπτωση που η δεξαμενή είναι γεμάτη, το νερό από την βρύση και το καζανάκι θα φεύγει στο δίκτυο αποχέτευσης.


Εκπαιδευτικοί στόχοι του έργου:
- Καλλιέργεια ικανότητας επίλυσης προβλημάτων.
- Ανάπτυξη κριτικής και αλγοριθμικής σκέψης.
- Εξοικείωση με κατασκευές αυτοματισμού.
- Ενίσχυση της υπευθυνότητας των μαθητών σε θέματα εξοικονόμησης φυσικών πόρων και υγιεινής δημόσιων χώρων.
- Καλλιέργεια ομαδικότητας και συνεργασίας.
Σενάριο λειτουργίας μηχανισμού:
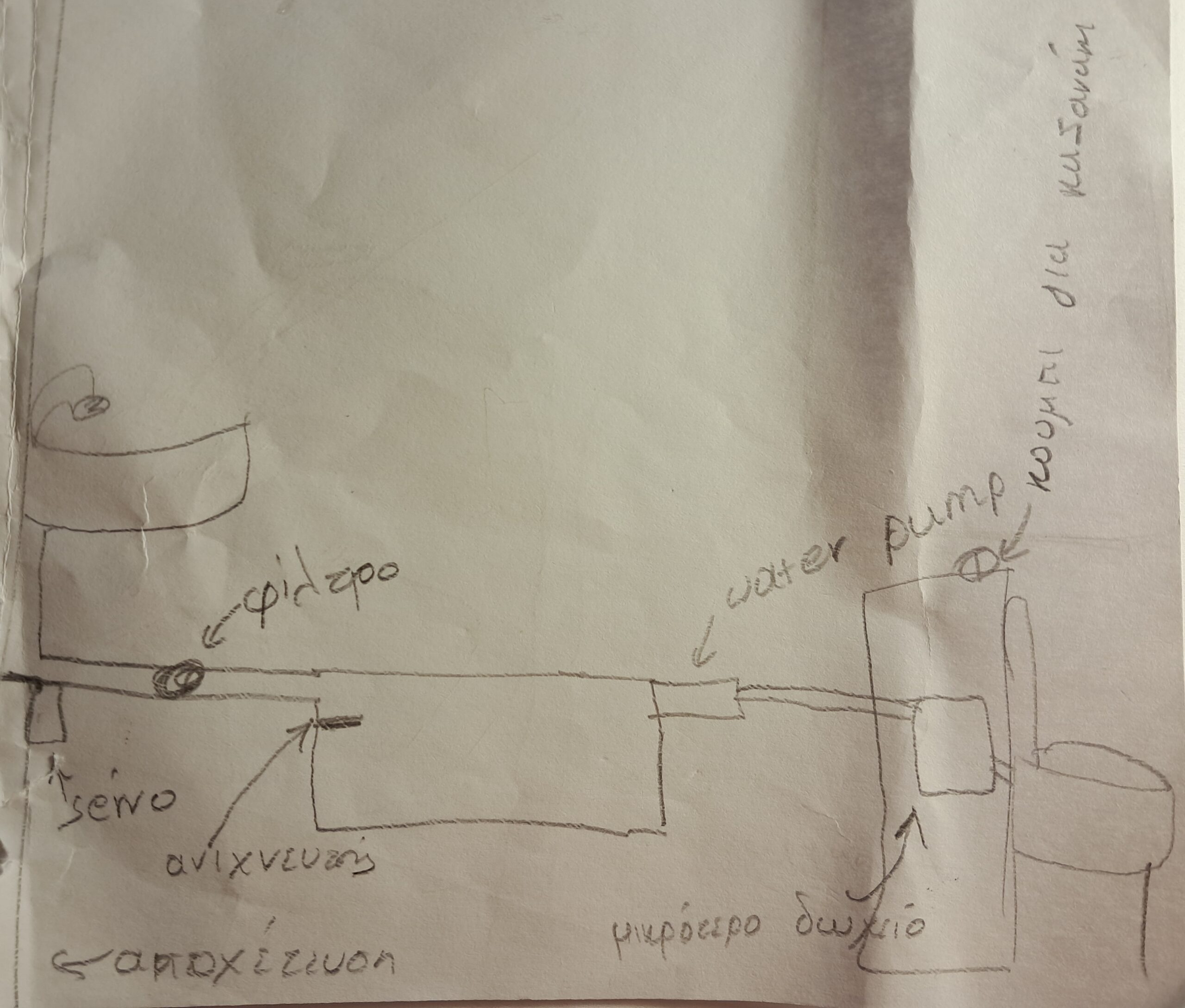
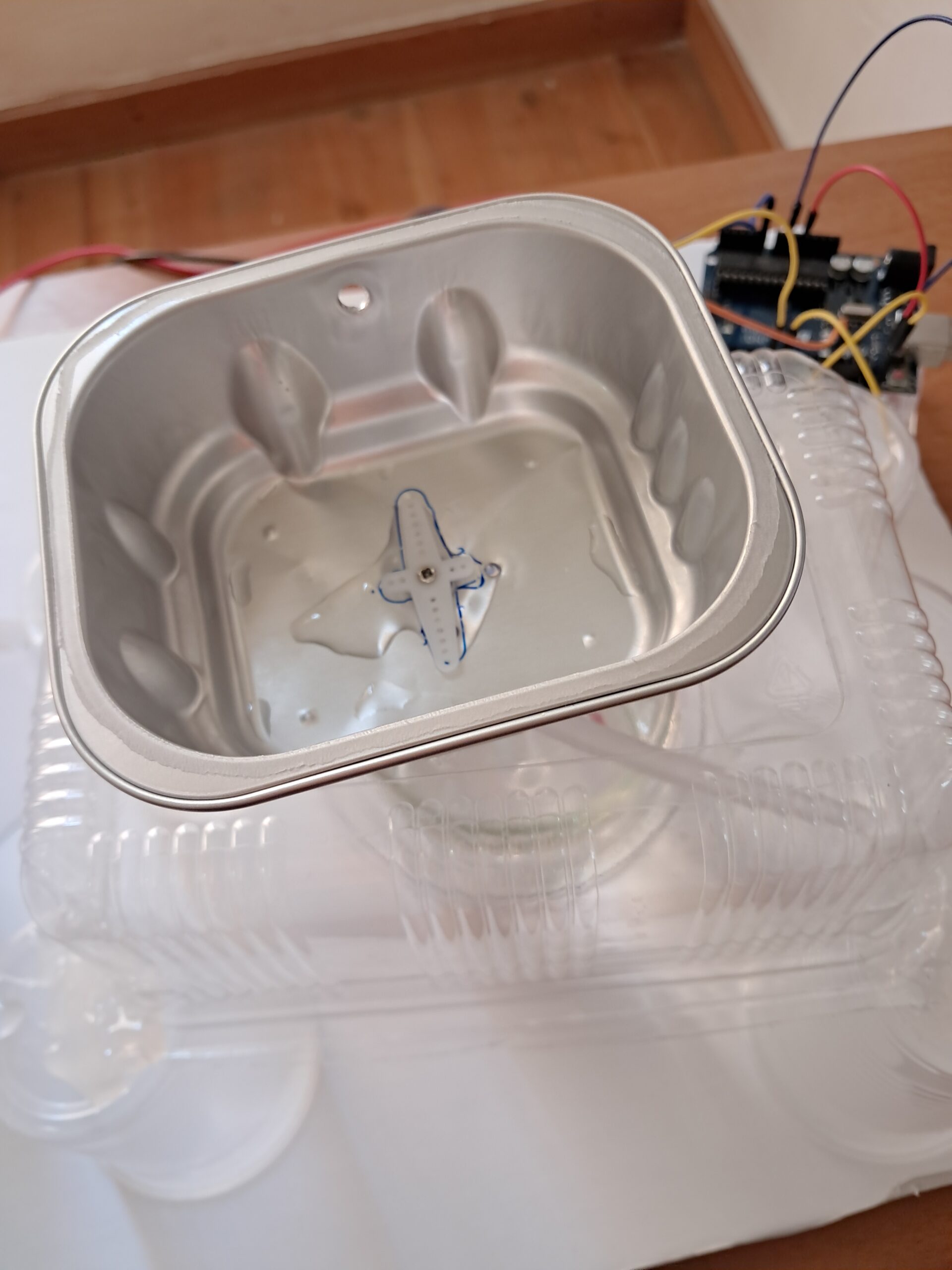
Το νερό από το νιπτήρα της τουαλέτας, διοχετεύεται σε μια δεξαμενή. Ένας αισθητήρας ύψους στάθμης νερού, ελέγχει τη στάθμη συνεχώς. Σε περίπτωση που ανεβεί πολύ η στάθμη του νερού μέσα στη δεξαμενή, περιστρέφεται ο 1ος servo κινητήρας, ανοίγει την παροχή προς το δίκτυο αποχέτευσης και κλείνει αυτήν προς τη δεξαμενή. Εάν κατεβεί η στάθμη του νερού, τότε ο servo κινητήρας επιστρέφει στην αρχική θέση.
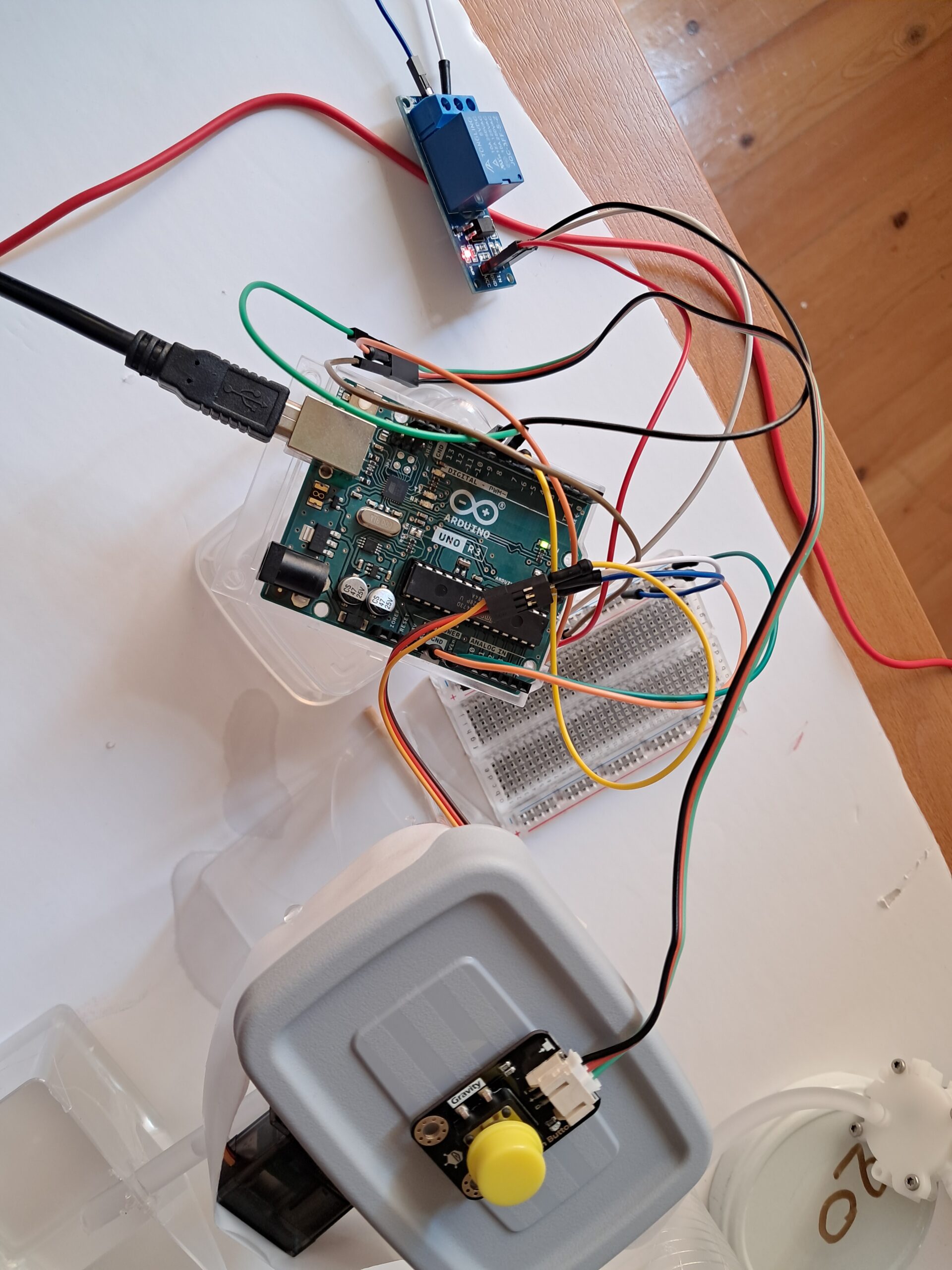
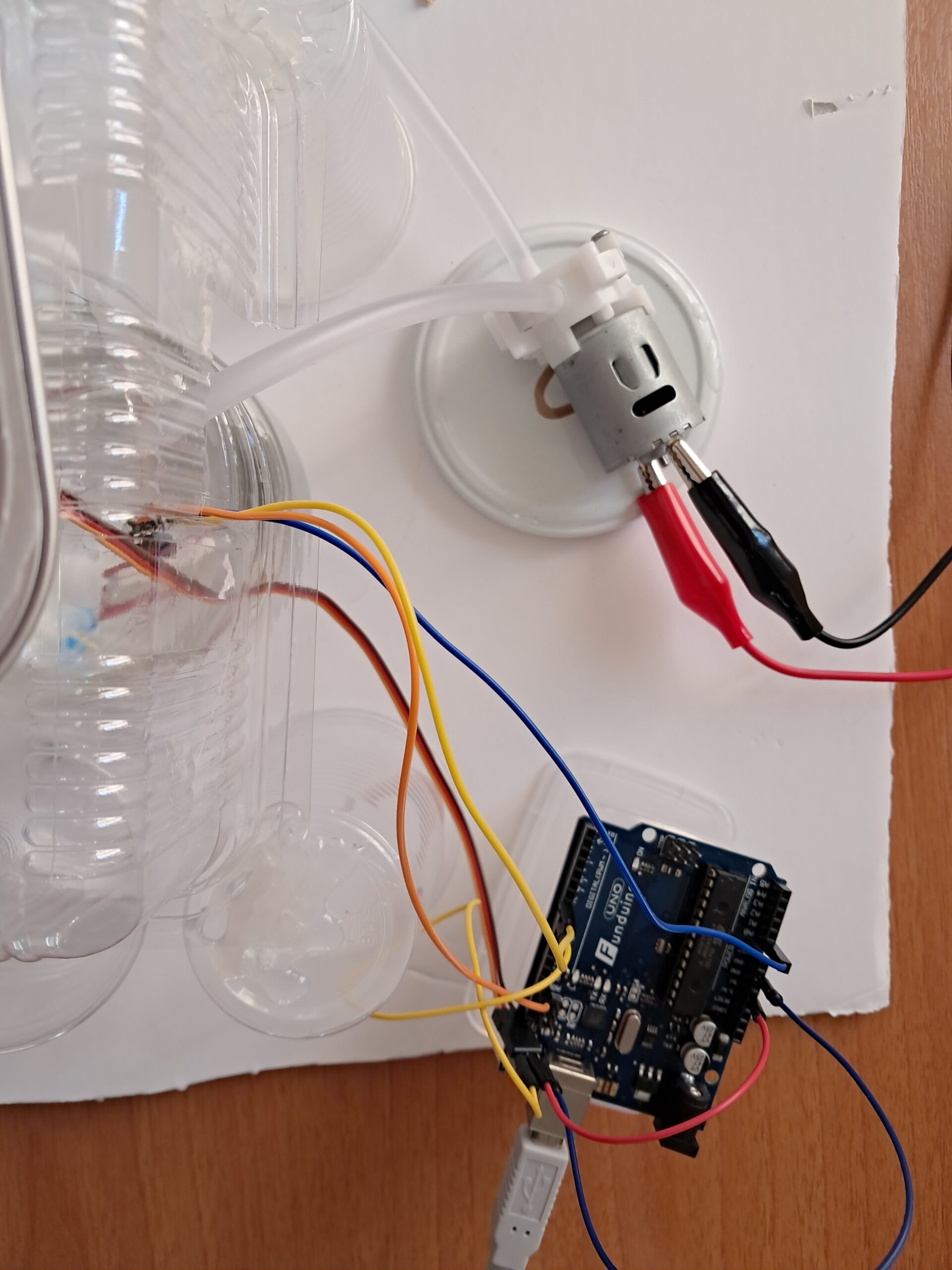
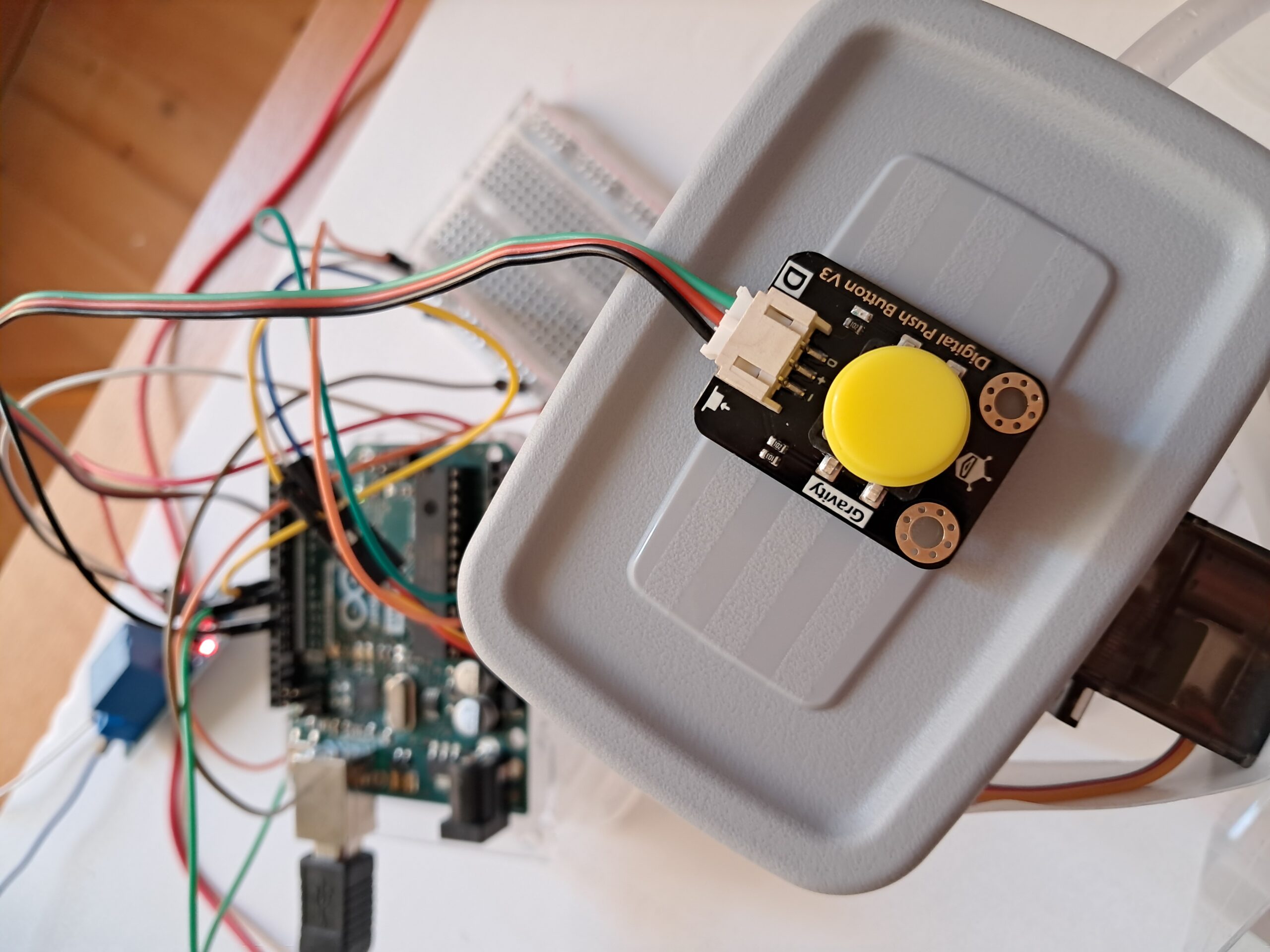
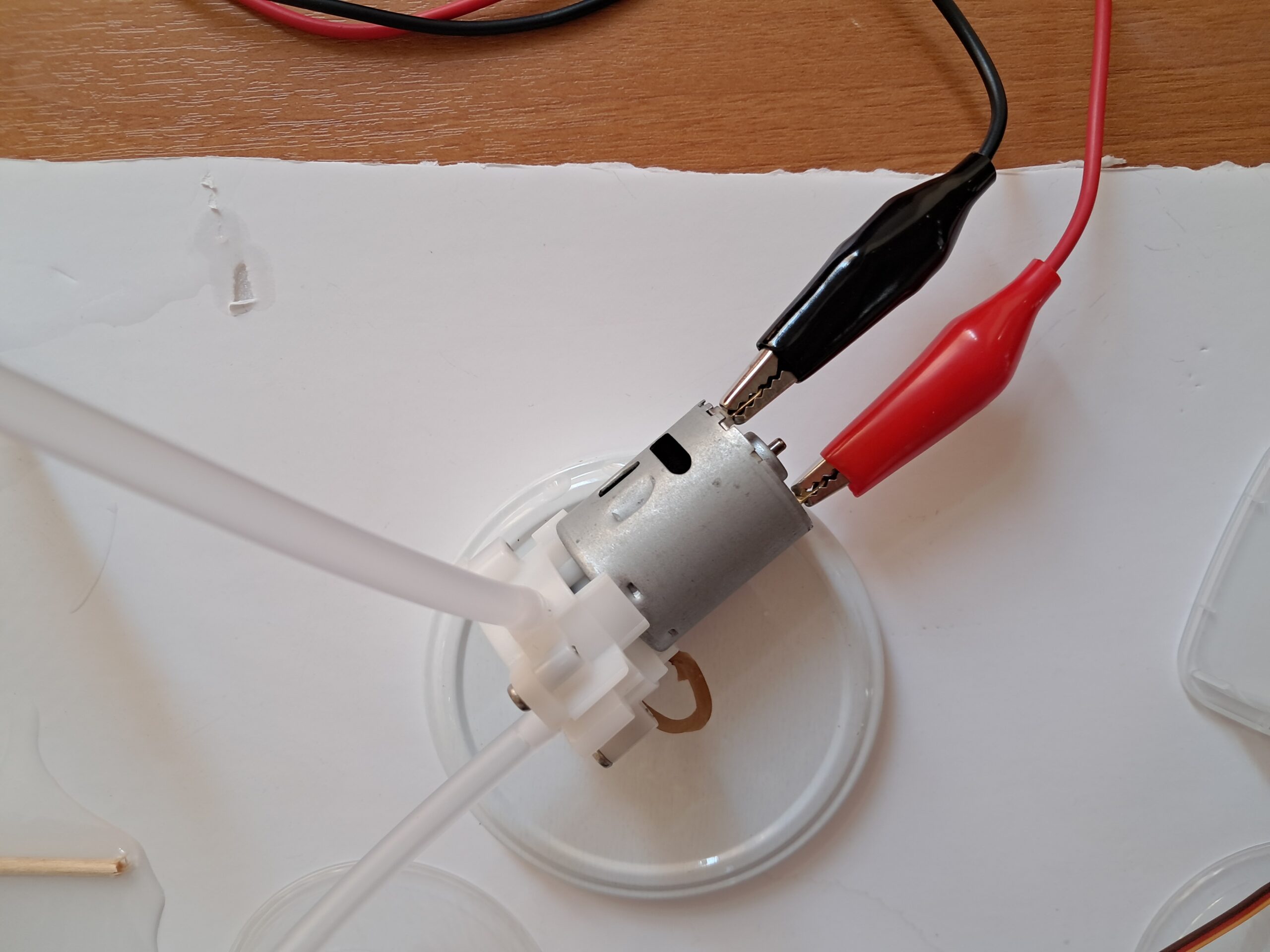
Το καζανάκι λειτουργεί με ένα button. Μόλις πιεστεί το button, περιστρέφεται ο 2ος servo κινητήρας, ανοίγοντας την παροχή προς τη λεκάνη της τουαλέτας για 3 δευτερόλεπτα. Στη συνέχεια, ο servo κινητήρας επιστρέφει στην αρχική θέση και ενεργοποιείται η αντλία για 2 δευτερόλεπτα μεταφέροντας νερό στο καζανάκι από τη δεξαμενή συγκέντρωσης νερού.

Προγραμματισμός:
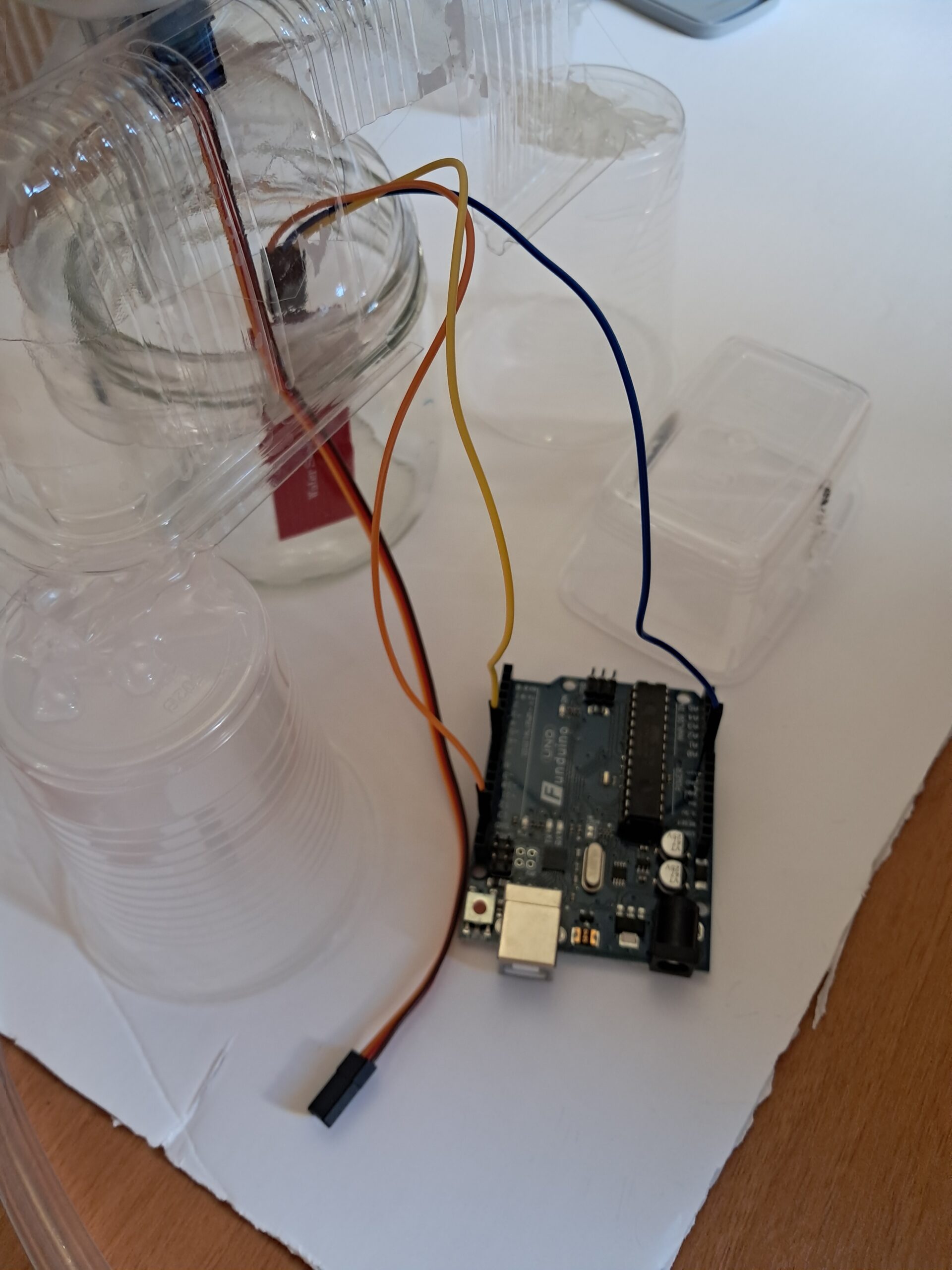
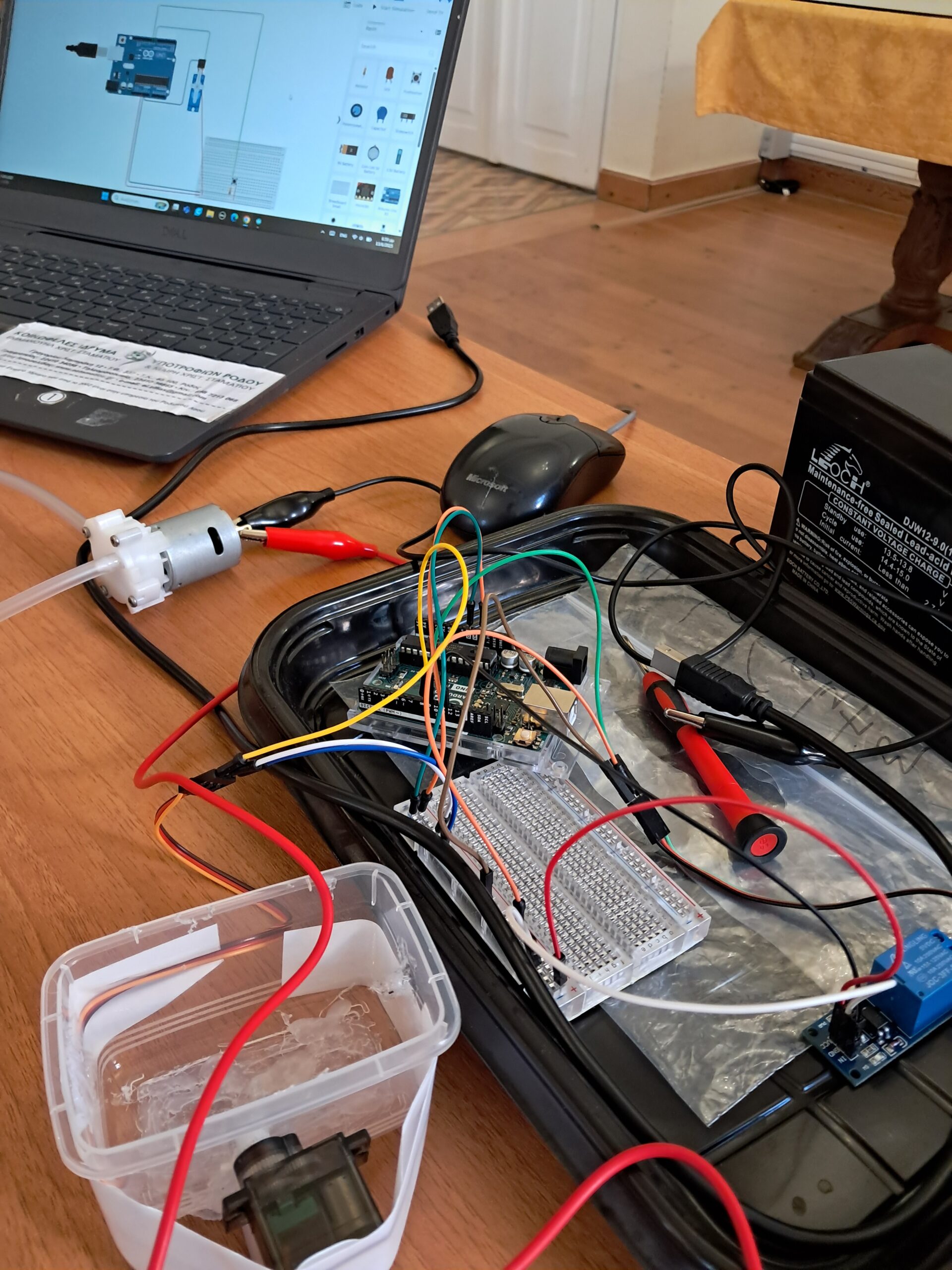
 Ο προγραμματισμός πραγματοποιήθηκε στο Arduino ΙDE. Για τον καλύτερο συντονισμό των servo κινητήρων, του αισθητήρα στάθμης νερού και της αντλίας αποφασίστηκε να χρησιμοποιηθούν δύο Arduino Uno. Ένα για να ρυθμίζει τον servo κινητήρα του νιπτήρα και τον αισθητήρα στάθμης νερού και ένα για το button στο καζανάκι, τον 2ο servo κινητήρα και την αντλία.
Ο προγραμματισμός πραγματοποιήθηκε στο Arduino ΙDE. Για τον καλύτερο συντονισμό των servo κινητήρων, του αισθητήρα στάθμης νερού και της αντλίας αποφασίστηκε να χρησιμοποιηθούν δύο Arduino Uno. Ένα για να ρυθμίζει τον servo κινητήρα του νιπτήρα και τον αισθητήρα στάθμης νερού και ένα για το button στο καζανάκι, τον 2ο servo κινητήρα και την αντλία.
Για τις αρχικές δοκιμές, οι μηχανισμοί σχεδιάστηκαν και προγραμματίστηκαν στο Tinkercad.
Τα αρχεία του κώδικα που χρησιμοποιήθηκε υπάρχουν στο αποθετήριο του έργου: https://github.com/iliana-gian/RoboEvolution/tree/main/code
Προβλήματα που προέκυψαν:
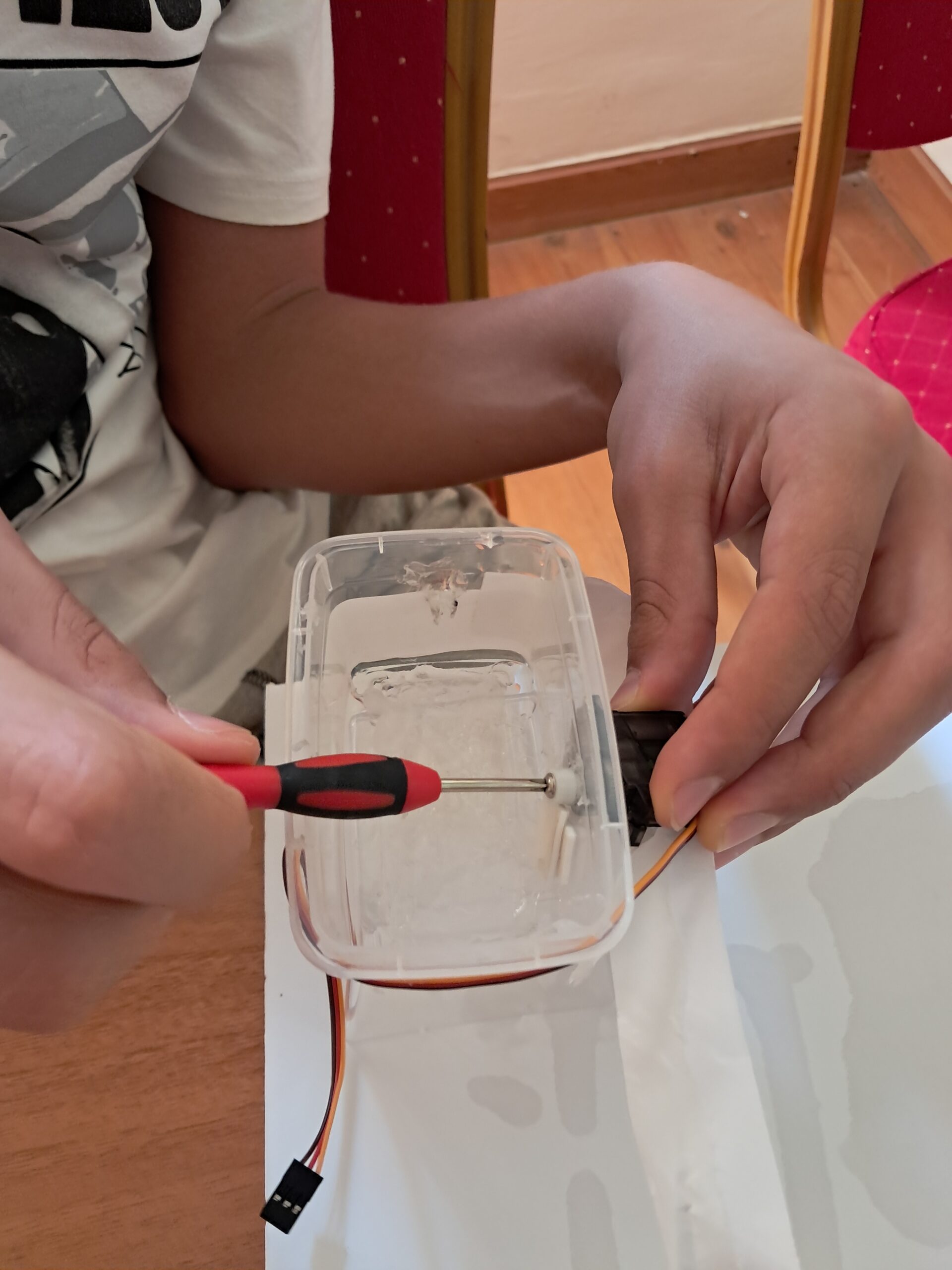
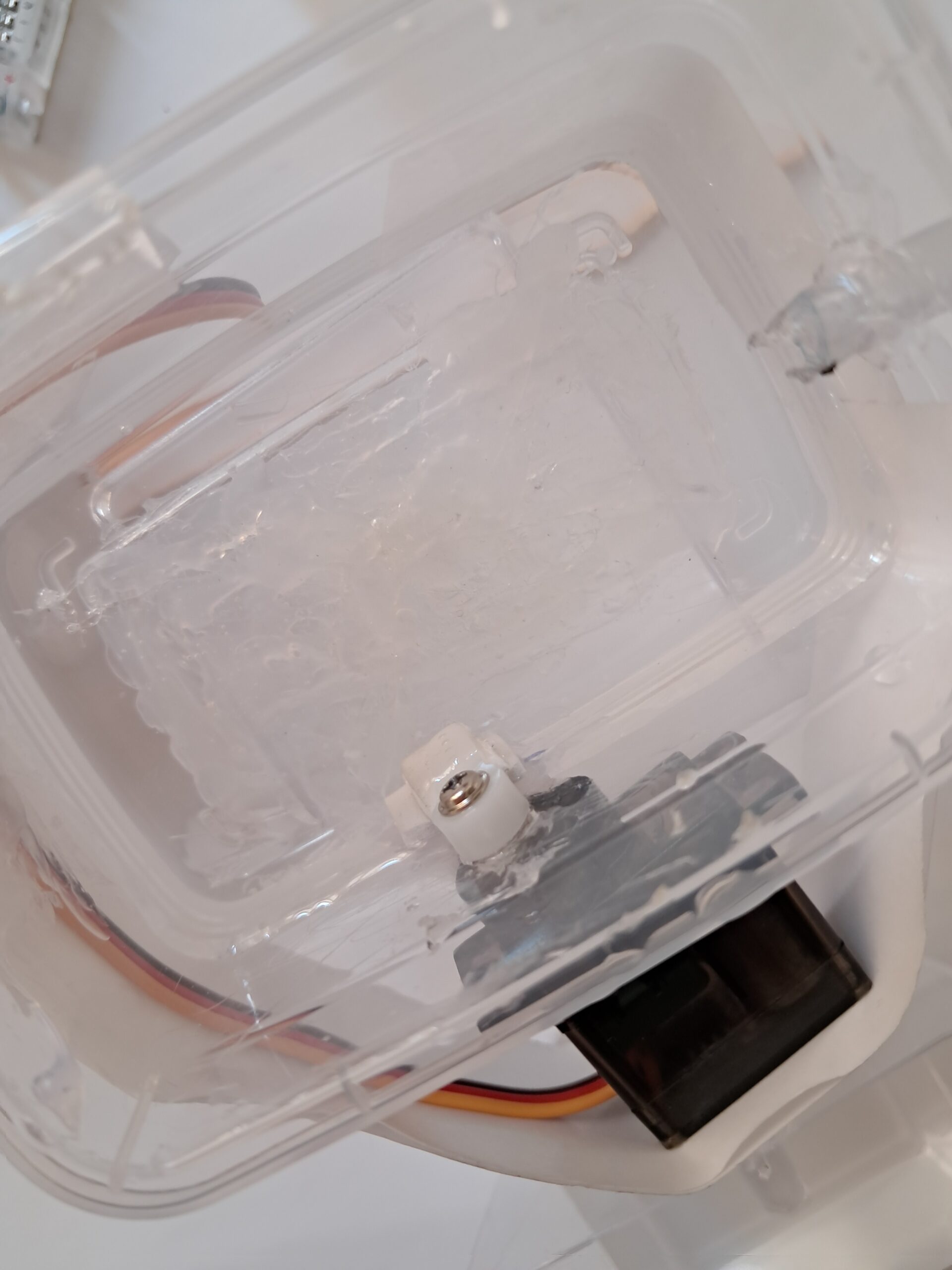
- Στεγανοποίηση. Δυστυχώς σε ορισμένα σημεία της κατασκευής όπου το λάστιχο ενωνόταν με τη δεξαμενή, υπήρχε μικρή διαρροή. Επίσης, δεν έκλειναν πλήρως οι τρύπες με αποτέλεσμα λίγο νερό να φεύγει ταυτόχρονα και στη δεξαμενή συγκέντρωσης νερού και στην αποχέτευση.
- Λόγω των διαρροών, αποφασίστηκε να μην τοποθετηθεί φίλτρο για συγκράτηση πιθανών σκουπιδιών που θα υπάρχουν μέσα στο νερό.
- Σταθεροποίηση των servo κινητήρων. Για να κλείνουν όσο το δυνατό καλύτερα οι τρύπες, έπρεπε ο servo να είναι πολύ καλά σταθεροποιημένος. Αποδείχτηκε μεγάλη πρόκληση.


Δυνατές επεκτάσεις έργου
– Ανακύκλωση, καθαρισμός και επαναχρησιμοποίηση των νερών της τουαλέτας.
Εξοπλισμός:
- 2 Arduino Uno
- 2 Arduino Uno Breadboard
- Jumper Wires
- Water level sensor
- Liquid Pump Motor – Micro 5V
- Button
- Silicone Tube Transparent 6x8mm – per meter
- Relay Module – 1 Channel 5V Low Level Trigger (Screw Terminals)
- Alligator to Alligator Cables
- 2 Servo Motors
- Μπαταρία 12V
- Πλαστικές Δεξαμενές
Ενδεικτικό κόστος: 53euro
Για την κατασκευή της μακέτας αξιοποιήθηκαν υλικά που ήταν διαθέσιμα στο χώρο του Ιδρύματος Σταματίου.
Εδώ: https://www.youtube.com/watch?v=j-kLz_qUXUI μπορείτε να δείτε βίντεο με τη λειτουργία των δύο μηχανισμών.
Και εδώ: https://github.com/iliana-gian/RoboEvolution επιπλέον πληροφορίες και φωτογραφικό υλικό.
Τα μέλη της ομάδας μας:
- ΖΟΥΒΕΛΕΚΗΣ ΕΛΕΥΘΕΡΙΟΣ
- ΖΟΥΒΕΛΕΚΗΣ ΝΙΚΟΛΑΟΣ
- Καραγιάννης Πριέτο Δημήτρης
- Ρώσση Γεωργία
Υπεύθυνοι εκπαιδευτικοί:
- Ηλιάνα Γιαννούση
- Καλλιόπη-Τσαμπίκα Κασταμούλα