Είμαστε η ομάδα AI Commandos από το 1ο ΕΠΑΛ Τρικάλων και υλοποιήσαμε το έργο “Ρύθμιση σηματοδοτών κυκλοφορίας με τεχνητή νοημοσύνη”.
Έρευνα
Ένα τεράστιο πρόβλημα των σύγχρονων πόλεων είναι το πρόβλημα της κυκλοφοριακής συμφόρησης, που εμφανίζεται πλέον έντονα και στις μικρότερες πόλεις, όπως είναι τα Τρίκαλα.
Οι συνέπειες είναι πολλές: χαμένος χρόνος για οδηγούς και επιβάτες, αυξημένες εκπομπές ρύπων, μεγαλύτερη κατανάλωση καυσίμων, σπατάλη ενέργειας, δημιουργία εκνευρισμού και άγχους, υποβάθμιση της ποιότητας ζωής κλπ.
Η κυκλοφοριακή συμφόρηση σε μια πόλη μπορεί να προκαλείται από πολλές αιτίες, μία από τις οποίες είναι οι αστικές διασταυρώσεις δύο δρόμων με φανάρια, όπου ο ένας δρόμος έχει μεγαλύτερη κίνηση από τον άλλον.
Σε αυτή την περίπτωση παρατηρείται το φαινόμενο να δημιουργούνται μεγάλες ουρές στο δρόμο με τη μεγαλύτερη κίνηση, ενώ στο δρόμο μικρότερης κίνησης δημιουργούνται μικρές ή και καθόλου ουρές, καθώς ο χρονισμός των φαναριών είναι σταθερός και δεν λαμβάνει υπόψη την τρέχουσα κίνηση σε κάθε δρόμο.
Σχεδιασμός
Η λύση που προτείνουμε είναι να δίνεται προτεραιότητα στο δρόμο που παρατηρείται μεγαλύτερη κίνηση, με κατάλληλη ρύθμιση των φαναριών έτσι ώστε το πράσινο να διαρκεί περισσότερο στο δρόμο μεγαλύτερης κίνησης, για να εκτονώνεται η κυκλοφορία.
Για την αναγνώριση του δρόμου μεγαλύτερης κίνησης δημιουργήσαμε ένα σύστημα με κάμερα και λογισμικό αναγνώρισης οχημάτων, μέσω τεχνικών επεξεργασίας εικόνας και βίντεο και με χρήση τεχνητής νοημοσύνης.
Το σύστημα ελέγχει τον αριθμό των αυτοκινήτων που προστίθενται στην ουρά ενός δρόμου και περιμένουν στο κόκκινο φανάρι. Όταν η ουρά αρχίζει να μεγαλώνει πάνω από ένα όριο, γίνεται ανάλογη ρύθμιση των φωτεινών σηματοδοτών έτσι ώστε να αποτραπεί η συμφόρηση.
Πιο συγκεκριμένα αυξάνεται η διάρκεια του πράσινου στο δρόμο με τη μεγαλύτερη ουρά, ενώ μειώνεται στον άλλο δρόμο.
Η κάμερα είναι στερεωμένη πάνω σε βάση και περιστρέφεται με τη βοήθεια ενός κινητήρα, έτσι ώστε να ελέγχει και τους δύο δρόμους της διασταύρωσης. Η κάμερα κοιτάζει πάντα στο δρόμο που έχει κόκκινο για να ελέγχει την ουρά που σχηματίζεται.
Με αυτό τον τρόπο η ρύθμιση των φαναριών επαναλαμβάνεται και προσαρμόζεται δυναμικά ανάλογα με την κίνηση που εμφανίζεται σε κάθε δρόμο της διασταύρωσης.

Λίστα υλικών
Τα υλικά που χρησιμοποιήσαμε είναι:
| Υλικό | Τιμή |
| Τροφοδοτικό 12V 3A | 7.20 |
| Jumper Wires | 4.40 |
| Πλακέτα Δοκιμών | 3.20 |
| Arduino UNO R4 WiFi | 32.80 |
| Servo Standard 7.5kg.cm Metal Gears | 16.90 |
| Gravity HUSKYLENS AI Machine Vision Sensor | 69.90 |
| Νήμα 3D εκτύπωσης | 25.00 |
| Σύνολο: | 160.00 |


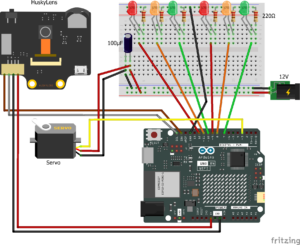
Το κύκλωμα του συστήματος φαίνεται στην παρακάτω εικόνα.
GitHub
Όλες οι λεπτομέρειες του έργου βρίσκονται αναρτημένες στη σελίδα μας στο github:
https://github.com/1epaltrik/aicommandos
Συγκεκριμένα μπορείτε να δείτε:
- Σχέδια κυκλωμάτων
- Αντικείμενα 3D
- Κώδικας Arduino
- Έγγραφα (Έρευνα – Σχεδιασμός)
- Φύλλα Εργασίας
- Φωτογραφίες από την κατασκευή
- Φωτογραφίες από εκδηλώσεις
Βίντεο
Δείτε την παρουσίαση του έργου εδώ.