Pinewood Panthers- Dog Feeder
Η φροντίδα των αδέσποτων σκύλων σε κέντρα προστασίας τους ή σε πλατείες και δρόμους είναι μια πολύ δύσκολη υπόθεση. Ένα σημαντικό κομμάτι της φροντίδας των σκύλων είναι η διατροφή τους. Κάθε σκύλος θέλει συγκεκριμένη ποσότητα τροφής ανάλογα με το μέγεθος του. Αυτό είναι μια πολύ δύσκολη αποστολή για τους ανθρώπους που φροντίζουν τους σκύλους. Επίσης οι άνθρωποι αυτοί δαπανούν πολλά χρήματα για τις τροφές κάτι που μπορεί να διευκολυνθεί αν γίνεται σωστό μοίρασμα της τροφής.
Πώς μπορούμε να χρησιμοποιήσουμε την Τεχνητή Νοημοσύνη για να τους βοηθήσουμε; Μια ομάδα μαθητών της Ε΄ Δημοτικού του Σχολείου Pinewood θα δημιουργήσουν μια αυτόματη ταΐστρα για σκυλιά. Τα σκυλιά μοντέλα θα καταγραφούν και θα εκπαιδεύσουμε το teachable machine με φωτογραφίες τους να τα αναγνωρίζει. Όταν αναγνωρίζεται ένας σκύλος θα ειδοποιείται ένα microbit το οποίο θα ανοίγει την ταΐστρα με ένα σερβοκινητήρα. Το microbit θα έχει προγραμματιστεί να κρατήσει την ταΐστρα ανοικτή ανάλογα με το σκύλο που θα έχει αναγνωριστεί από το teachable machine. Οι μεγαλύτεροι σκύλοι θα παίρνουν περισσότερη τροφή, οι μικρότεροι λιγότερη. Θα χρησιμοποιήσουμε τη τρισδιάστατη εκτύπωση για να τοποθετηθεί η κάμερα, τα δοχεία τροφής και ο ηλεκτρονικός και μηχανολογικός εξοπλισμός σε μια συμπαγή κατασκευή.
Μέσα από αυτό το έργο οι μαθητές θα μάθουν να εκπαιδεύουν αποτελεσματικά ένα σύστημα τεχνητής νοημοσύνης χρησιμοποιώντας εικόνες. Μέσα από αυτήν τη εκπαίδευση θα παράγεται ένα ωφέλιμο έργο με την αλληλεπίδραση ηλεκτρονικού και μηχανολογικού εξοπλισμού και τον συντονισμό τους μέσω του προγραμματισμού. Η τρισδιάστατη σχεδίαση θα προσφέρει τη λύση για τον συνεκτικό και αποτελεσματικό συνδυασμό των φυσικών αντικειμένων που αποτελούν τον εξοπλισμό.
Προτεινόμενος Εξοπλισμός
BBC Micro:bit V2 Board
DFRobot USB Camera Module 8MP
Servo:Lite board
Servo Micro Gears (FS90)
PLA Filament – 1.75mm
Υλοποίηση
Αρχικό Σχέδιο: Από τη στιγμή που είχαμε όλα τα υλικά ήμασταν έτοιμοι να προχωρήσουμε στην κατασκευή/υλοποίηση. Μετά από συζήτηση καταλήξαμε ότι η συσκευή θα ήταν όπως φαίνεται στη παρακάτω εικόνα.

Αρχικά θα φτιάχναμε το κέλυφος με τουβλάκια και μετά με 3D Printing. Όταν βρήκαμε την κατασκευή που λειτουργούσε σωστά, χρησιμοποιήσαμε το σχήμα και τις διαστάσεις για να το σχεδιάσουμε τρισδιάστατα.

Μοντέλο Teachable Machine: Για να μπορέσει να γίνει αποτελεσματική ταυτοποίηση των διαφορετικών κατηγοριών μεγεθών των σκύλων χρειάστηκε να χρησιμοποιηθούν ποικιλία μοντέλων σκύλων διαφόρων μεγεθών οι οποίες ταξινομήθηκαν σε δύο τάξεις: “big” και ¨skinny”. Ανακαλύψαμε ότι πολλές λεπτομέρειες παίζουν ρόλο κατά την ταυτοποίηση, όπως το περιβάλλον πίσω από το σκύλο ή ο αριθμός των εικόνων της κάθε τάξης. Καταλήξαμε σε ένα μοντέλο που ταξινομούσε αποτελεσματικά τους σκύλος ανάλογα με το μέγεθος τους στις δύο τάξεις. Χρησιμοποιήσαμε την εφαρμογή Make:ΑΙ robots για να παρέχουμε την πληροφορία ταξινόμησης από το teachable machine στο microbit.
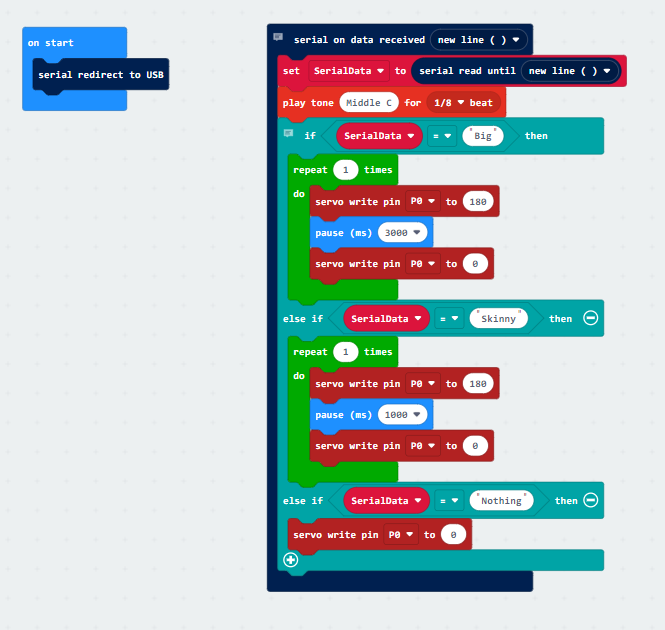
Ελεγχος Σερβοκινητηρα: Προγραμματίσαμε το micro:bit να ανοίγει το στόμιο του μπουκαλιού που περιείχε την τροφή για περισσότερο χρόνο όταν αναγνωρίζονταν η τάξη “big” και για λιγότερο χρόνο όταν αναγνωριζόταν η τάξη “skinny”, έτσι ώστε να παρέχει περισσότερη τροφή στα μεγάλα σκυλιά και λιγότερη στα μικρά. Χρειάστηκαν αρκετές δοκιμές για να βγαίνει η σωστή ποσότητας τροφής με ομαλό τρόπο.
Τρισδιάστατη εκτύπωση: Στη συνέχεια σχεδιάσαμε τα σταθερά μέρη της συσκευής μας στο Tinkercad. Οι διαστάσεις που χρησιμοποιήθηκαν βασίστηκε στο μοντέλο που είχε φτιαχτεί με τουβλάκια. Η σχεδίαση έγινε με τρόπο που δεν χρειάστηκαν supports.

Τελική Συναρμολόγηση και δοκιμή: Οταν εκτυπώθηκε το μοντέλο μας το συναρμολογήσαμε και τοποθετήσαμε την κάμερα, το μπουκάλι με την τροφή και τον σερβοκινητήρα με το micro:bit. Χρειάστηκε ένα στήριγμα για τον σερβοκινητήρα και ένα από τα εκτυπωμένα μέρη έπρεπε να μεγαλώσει. Χρησιμοποιήσαμε σκληρό χαρτόνι το οποίο εφαρμόστηκε καλά.
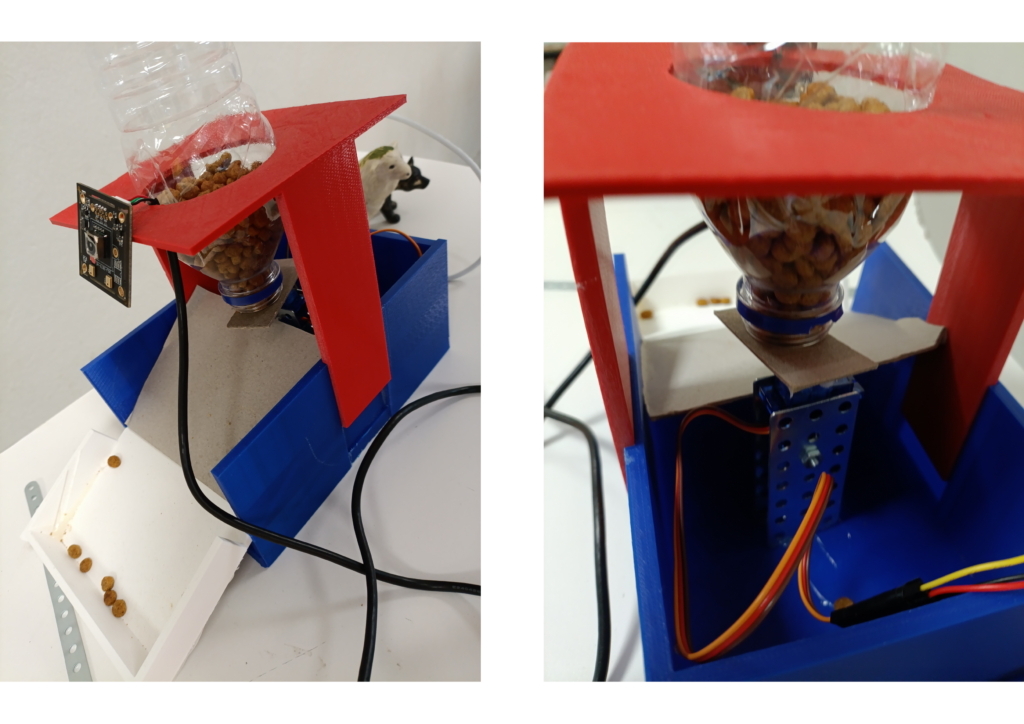
Το μηχάνημα λειτουργούσε καλά. Έβγαινε περισσότερη τροφή στο μεγάλο και λιγότερη στο μικρό ζώο.
Μπορείτε να το δείτε να δουλεύει στο παρακάτω βίντεο.