Καλώς ήρθατε στη σελίδα του έργου μας για τον 6o Πανελλήνιο Διαγωνισμό Ανοιχτών Τεχνολογιών στην Εκπαίδευση!
Είμαστε η ομάδα “AI Fishing” από τα Κουφονήσια και υλοποιήσαμε το έργο “Ο ξεκούραστος ψαράς!”, ένα καινοτόμο σύστημα ψαρέματος που αξιοποιεί την Τεχνητή Νοημοσύνη για να απλοποιήσει και να βελτιώσει τη διαδικασία ψαρέματος.
Μπορείτε να βρείτε το σχηματικό της διάταξης, οδηγίες για τον προγραμματισμό του Pico με CircuitPython, καθώς και τον κώδικα της διάταξης με επεξηγηματικά σχόλια στο αποθετήριό μας στο GitHub: https://github.com/psarrospolydoros/ai_fishing
Επίσης, μπορείτε να παρακολουθήστε την παρουσίαση του έργου εδώ: https://youtu.be/Hv5dgWjqkRY
Η υπάρχουσα κατάσταση
Η διαδικασία του ψαρέματος είναι γνωστή για τις προκλήσεις και τις δυσκολίες που ενέχει, όπως η ανάγκη για υπομονή, οι μεταβαλλόμενες καιρικές συνθήκες και η αβεβαιότητα της επιτυχίας. Επιπλέον, η παραδοσιακή μέθοδος ψαρέματος συχνά απαιτεί σημαντική σωματική προσπάθεια και εμπειρία για τον εντοπισμό των ψαριών.
Στη σύγχρονη εποχή, η τεχνολογία έχει προσφέρει πολλές λύσεις για να διευκολύνει την καθημερινή ζωή. Ωστόσο, ο τομέας του ψαρέματος δεν έχει επωφεληθεί στον ίδιο βαθμό από την καινοτομία και την τεχνολογική πρόοδο. Υπάρχει μια εμφανής ανάγκη για βελτιστοποίηση και απλοποίηση της διαδικασίας ψαρέματος, κάνοντας την πιο προσιτή και αποτελεσματική.
Το πρόβλημα
Οι ψαράδες συχνά αντιμετωπίζουν τις εξής προκλήσεις:
- Δυσκολία στον εντοπισμό των ψαριών.
- Σωματική κόπωση λόγω των απαιτήσεων της διαδικασίας.
- Χαμηλή ενεργειακή απόδοση κατά την προσπάθεια ψαρέματος.
Αυτές οι δυσκολίες καθιστούν το ψάρεμα μια απαιτητική και λιγότερο αποδοτική δραστηριότητα, η οποία θα μπορούσε να βελτιωθεί σημαντικά με τη χρήση σύγχρονων τεχνολογιών.
Η λύση μας
Το project “Ο ξεκούραστος ψαράς!” προτείνει μια ολοκληρωμένη λύση που απλοποιεί τη διαδικασία ψαρέματος χρησιμοποιώντας Μηχανική Όραση και Τεχνητή Νοημοσύνη.
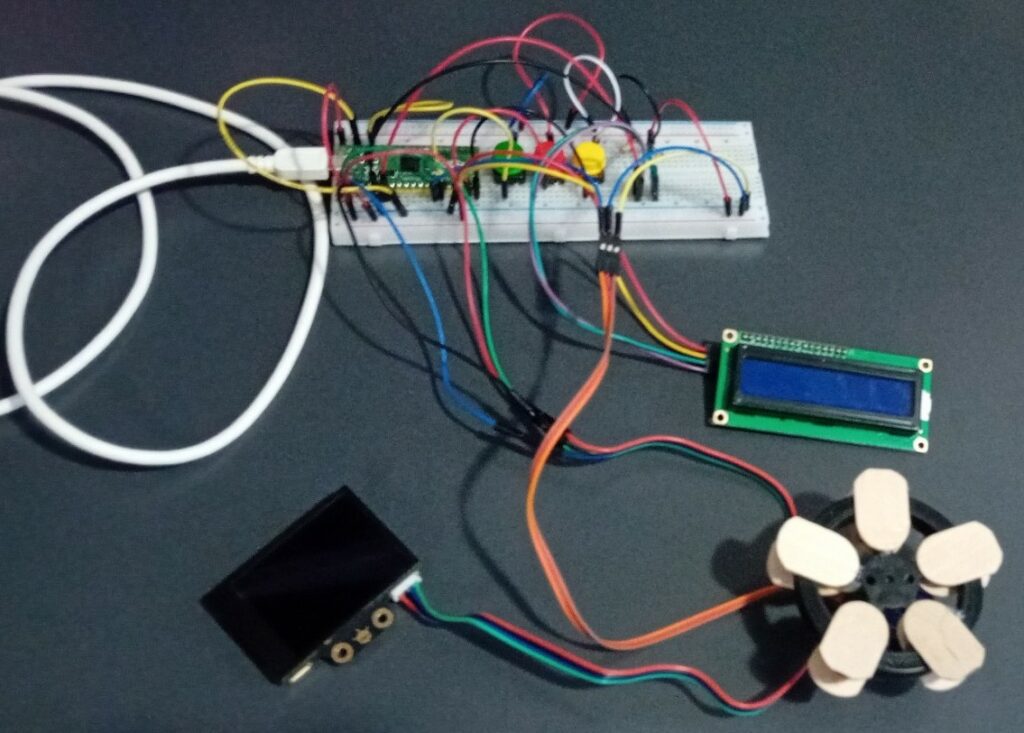
Αναλυτικά, το σύστημα μας περιλαμβάνει:
- Κάμερα Huskylens: Χρησιμοποιεί μηχανική όραση για τον εντοπισμό των ψαριών στην εικόνα ενός βυθόμετρου.
- Raspberry Pi Pico: Μικροελεγκτής προγραμματισμένος με CircuitPython, ο οποίος επεξεργάζεται τις πληροφορίες από την κάμερα και ελέγχει τα υπόλοιπα εξαρτήματα.
- Σερβοκινητήρα συνεχούς περιστροφής: Ελέγχεται από τον Pico και χρησιμοποιείται για την κίνηση της πετονιάς.
- Οθόνη LCD: Εμφανίζει τις ενδείξεις και τις ειδοποιήσεις για τον ψαρά.
Επιπλέον υπάρχει η δυνατότητα χειροκίνητου ελέγχου του βάθους στο οποίο βρίσκεται το αγκίστρι, χρησιμοποιώντας τρία κουμπιά: Όσο πατάμε το πρώτο κουμπί το αγκίστρι ανεβαίνει προς τα πάνω, όσο πατάμε το δεύτερο κουμπί το αγκίστρι βυθίζεται περισσότερο, ενώ αν πατηθεί το τρίτο κουμπί το αγκίστρι ανεβαίνει μέχρι να φτάσει στην επιφάνεια.
Όταν ωστόσο η Τεχνητή Νοημοσύνη μπει στο παιχνίδι, η διαδικασία του ψαρέματος αυτοματοποιείται εντελώς! Αρκεί να στρέψουμε την κάμερα Huskylens προς την οθόνη του βυθόμετρου. Έχοντας εκπαιδεύσει την κάμερα να αναγνωρίζει τα ψάρια όπως απεικονίζονται στην εικόνα του βυθόμετρου, το σύστημα ενεργοποιείται: το αγκίστρι κινείται αυτόματα προς το ψάρι, είτε αυτό βρίσκεται σε μεγαλύτερο βάθος είτε σε μικρότερο, μέχρι να το φτάσει.

Ηλεκτρονικά μέρη και κόστος
- Raspberry Pi Pico H (7,9€)
- Gravity HUSKYLENS (69,9€)
- Servo Micro 1.5kg.cm Continuous Rotation (5,9€)
- Basic 16×2 Character LCD I2C – White on Blue 5V (5,9€)
- Κουμπιά, αντιστάτες, καλώδια και breadboard
Το συνολικό κόστος της διάταξης δεν ξεπερνά τα 100€ και όλα τα εξαρτήματα μπορούν να επαναχρησιμοποιηθούν.
Εκπαιδευτικοί στόχοι
- Κατανόηση της διαδικασίας μέσω της οποίας ένας υπολογιστής μπορεί να διακρίνει αντικείμενα χρησιμοποιώντας μηχανική όραση.
- Καλλιέργεια υπολογιστικής σκέψης μέσω της δημιουργίας απλών προγραμμάτων σε γλώσσα Python για την υλοποίηση των αυτοματισμών.
- Ανάπτυξη ηθικής και κοινωνικής συνείδησης μέσω της εισαγωγής σε ζητήματα που σχετίζονται με τη χρήση της Τεχνητής Νοημοσύνης.
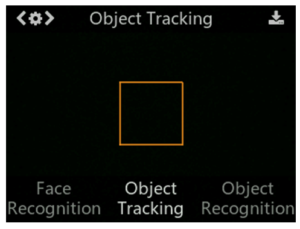
Οδηγίες για “Object Tracking” με τη Huskylens
- Περιστρέψτε το κουμπί λειτουργίας προς τα αριστερά ή δεξιά μέχρι να εμφανιστεί η ένδειξη “Object Tracking” στην κορυφή της οθόνης.
- Πατήστε παρατεταμένα το κουμπί λειτουργίας για να εισέλθετε στις ρυθμίσεις παραμέτρων της λειτουργίας παρακολούθησης αντικειμένων.
- Περιστρέψτε το κουμπί λειτουργίας προς τα δεξιά για να επιλέξετε “Learn Enable”, στη συνέχεια πατήστε σύντομα το κουμπί λειτουργίας και περιστρέψτε το προς τα δεξιά για να ενεργοποιήσετε το “Learn Enable”, δηλαδή το τετράγωνο εικονίδιο στη γραμμή προόδου να μετακινηθεί προς τα δεξιά. Στη συνέχεια, πατήστε σύντομα το κουμπί λειτουργίας για να επιβεβαιώσετε αυτήν την παράμετρο.
- Η μέθοδος για να ενεργοποιήσετε το διακόπτη αποθήκευσης μοντέλων αυτόματα είναι η ίδια με πριν. Ακολουθήστε τα παραπάνω βήματα για να ενεργοποιήσετε το “Auto Save”.
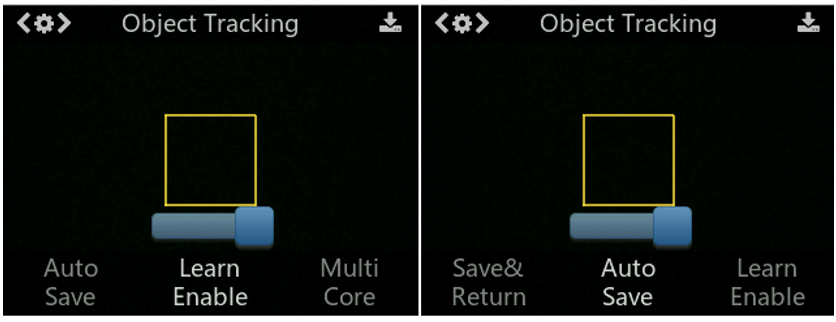
- Περιστρέψτε το κουμπί λειτουργίας προς τα αριστερά για να επιλέξετε “Save & Return” και πατήστε σύντομα το κουμπί λειτουργίας για να αποθηκεύσετε τις παραμέτρους και να επιστρέψετε αυτόματα.
Object Learning: Στρέψτε τη Huskylens προς το στόχο, ρυθμίζοντας την απόσταση μέχρι το αντικείμενο ώστε αυτό να περιλαμβάνεται στο κίτρινο πλαίσιο στο κέντρο της οθόνης. Στη συνέχεια, πατήστε παρατεταμένα το “κουμπί μάθησης” για να μάθετε το αντικείμενο από διάφορες γωνίες και αποστάσεις. Κατά τη διάρκεια της διαδικασίας μάθησης, το κίτρινο πλαίσιο με τις λέξεις “Learning: ID1” θα εμφανίζεται στην οθόνη.
Object Tracking: Κινήστε τη Huskylens ή το στόχο και το πλαίσιο θα παρακολουθεί αυτόματα τον στόχο. Κατά την παρακολούθηση του αντικειμένου, οι κίτρινες λέξεις “Learning: ID1” θα εμφανίζονται, υποδεικνύοντας ότι το Huskylens παρακολουθεί το αντικείμενο ενώ μαθαίνει. Αυτή η ρύθμιση βελτιώνει την ικανότητα παρακολούθησης αντικειμένων.
Επέκταση του έργου
Για την επέκταση του έργου, προτείνουμε τη χρήση ενός αγώγιμου καλωδίου που μεταβάλλει την αντίστασή του όταν του ασκείται δύναμη (Conductive Rubber Cord), με σκοπό τον αυτόματο εντοπισμό μιας επιτυχημένης ψαριάς.
Σας ευχαριστούμε που επισκεφθήκατε το site μας και ενδιαφερθήκατε για το έργο μας. Ελπίζουμε να βρείτε τη λύση μας χρήσιμη και να εμπνευστείτε για τις δικές σας καινοτομίες!