Περιγραφή λειτουργίας της φετινής δράσης RoboLab
Τη χρονιά 2022-23 λειτούργησε για 3η χρονιά η δράση RoboLab της Κεντρικής Παιδικής Βιβλιοθήκης του Δήμου Θεσσαλονίκης. Συμμετείχαν 7 παιδιά ηλικίας 11 με 12 ετών.
Μετά από καταιγισμό ιδεών αποφασίστηκε να δημιουργηθεί ρομπότ οδηγός που να κατευθύνει αυτούς που αναζητούν κάποιο βιβλίο στη θέση της βιβλιοθήκης όπου βρίσκεται το βιβλίο. Tο ονομάσαμε LibraryHost.
Σκοπός
Σκοπός της δράσης ήταν
- Να μπορούν οι μαθητές να εφαρμόζουν τη διαδικασία του κύκλου σχεδιασμού προϊόντος
- Να αναπτύξουν τις δεξιότητες του 21ου αιώνα
- Να μπορούν να περιγράψουν τον αλγόριθμο που πρέπει να ακολουθήσει το ρομπότ για να εξυπηρετήσει τον χρήστη της δανειστικής βιβλιοθήκης
- Να μπορούν να σχεδιάσουν σε προσομοίωση τη συνδεσμολογία του ρομπότ
- Να μπορούν οι μαθητές να δημιουργήσουν το τεχνούργημα ρομπότ οδηγό της βιβλιοθήκης
Διαδικασία υλοποίησης και τελικό αποτέλεσμα
Αρχικά αποφασίστηκε στην ολομέλεια τι θα κατασκευαστεί. Επειδή βρισκόμασταν στη βιβλιοθήκη, αποφάσισε η ολομέλεια να σχετίζεται το τεχνούργημα με τη βιβλιοθήκη. Τα παιδιά επισήμαναν ότι είναι δύσκολο να βρει κάποιος σε ποιο διάδρομο και ποιο ράφι βρίσκεται το βιβλίο που θέλει να διαβάσει.Το ρομπότ θα βοηθάει στην καθοδήγηση αυτών που αναζητούν κάποιο βιβλίο. Η παιδική βιβλιοθήκη αποτελείται από σειρές ραφιών που επαναλαμβάνονται αφήνοντας διαδρόμους ανάμεσά τους (Εικόνα 1 και Εικόνα 2).

Εικόνα 1: Σειρές από ράφια βιβλιοθήκης.

Εικόνα 2: Παράλληλες σειρές από ράφια με βιβλία.
Οι μαθητές έπρεπε να αποφασίσουν πως θα κινείται το LiraryHost, ώστε να οδηγεί στα βιβλία. Οι μαθητές παρουσίασαν τα παρακάτω διαγραμματικά σχέδια της κίνησης του ρομπότ (Εικόνες 3-5).
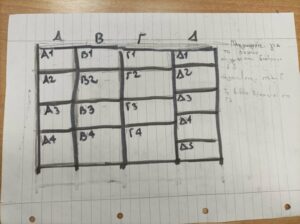
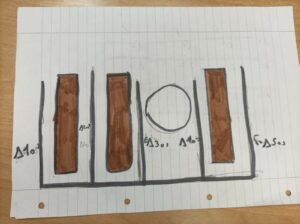
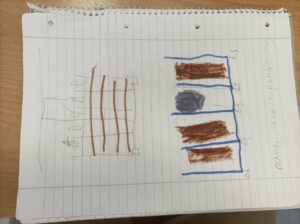
Εικόνες 3-7: Διαγράμματα του τρόπου κίνησης του LibraryHost.
Η συναρμολόγηση του alphabet έγινε σύμφωνα με τις οδηγίες που το συνοδεύουν. Εγκαταστάθηκε το Raspbian και οι βιβλιοθήκες για την οδήγηση των αισθητήρων και των ενεργοποιητών και έγιναν δοκιμές για διαπιστωθεί ότι όλα λειτουργούν κανονικά.

Εικόνα 8: Το έτοιμο LibraryHost.
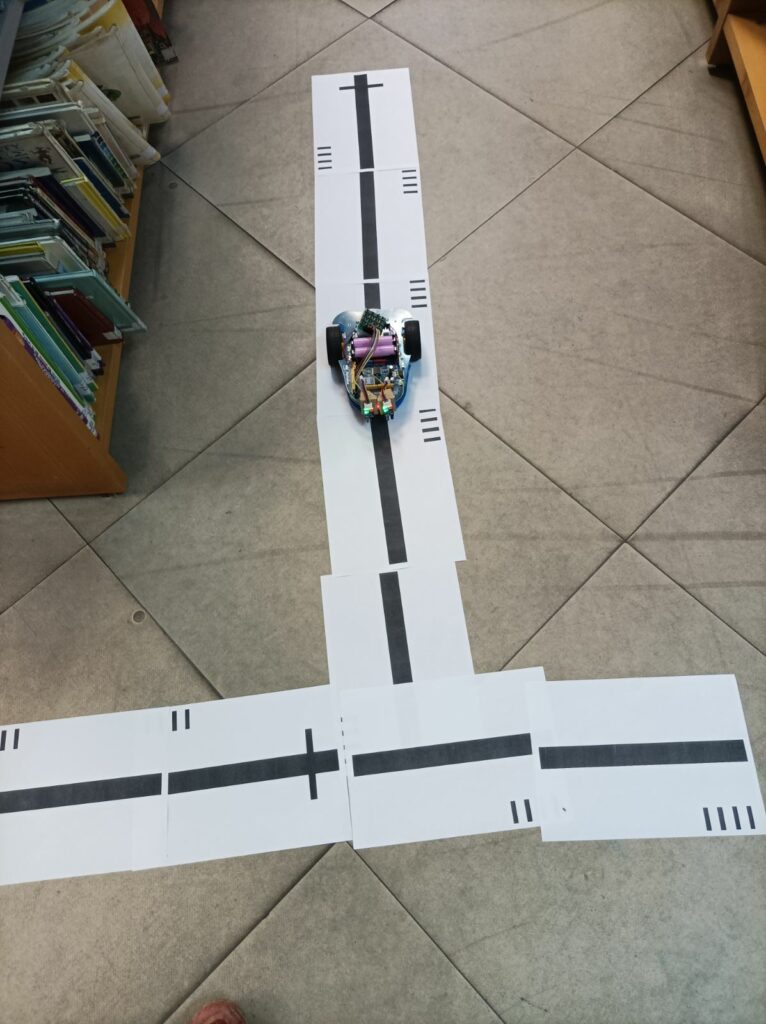
Το πρόγραμμα λειτουργίας του ρομπότ γράφτηκε σε python και ήταν τροποποίηση προγράμματος για ακολουθητή γραμμής. Το ρομπότ διαθέτει ενσωματωμένο ανιχνευτή υπέρυθρου με τέσσερις αισθητήρες. Τα δεδομένα που εισάγονται στο ρομπότ είναι ο αριθμός του διαδρόμου και ο αριθμός της κάθετης στήλης που βρίσκεται το βιβλίο. Το ρομπότ ξεκινά από την αφετηρία ακολουθεί τη μαύρη γραμμή και όταν συναντά την κάθετη μαύρη γραμμή, τότε σημαίνει όταν αν στρίψει κατά 90 μοίρες θα βρεθεί στον πρώτο διάδρομο. Αν δεν είναι να στρίψει στον πρώτο διάδρομο συνεχίζει μέχρι να έχει συναντήσει τόσες κάθετες γραμμές όσες τον αριθμό του διαδρόμου που βρίσκεται το βιβλίο. Σε αυτή την περίπτωση στρίβει 90 μοίρες και συνεχίζει να μετρά τις κάθετες γραμμές που συναντά. Όταν φτάσει στην κάθετη γραμμή που αντιστοιχεί στον αριθμό της κάθετης στήλης ραφιών που βρίσκεται το βιβλίο που αναζητά ένας πολίτης τότε το ρομπότ σταματά και αναγγέλει το ράφι στο οποίο βρίσκεται το βιβλίο.

Εικόνα 9: Το LibraryHost ξεκινά να βρει το βιβλίο.
Εικόνες 10 : Το LibraryHost πλησιάζει στο διάδρομο που επιλέχθηκε και ετοιμάζεται να στρίψει.

Εικόνες 11: Το LibraryHost έχει φτάσει στη στήλη που βρίσκεται το βιβλίο.
Πιθανές προεκτάσεις
Μια πιθανή προέκταση είναι να δίνει το ρομπότ πληροφορίες για το συγκεκριμένο ράφι αριθμός ραφιού και θέση του βιβλίου στο ράφι με ηχητικό και οπτικό σήμα.