Καθώς η ηλεκτρική ενέργεια αποτελεί ένα απαραίτητο αγαθό στον σημερινό τρόπο ζωής μας, η ομάδα μας υλοποίησε ένα σύστημα παραγωγής πράσινης ενέργειας.
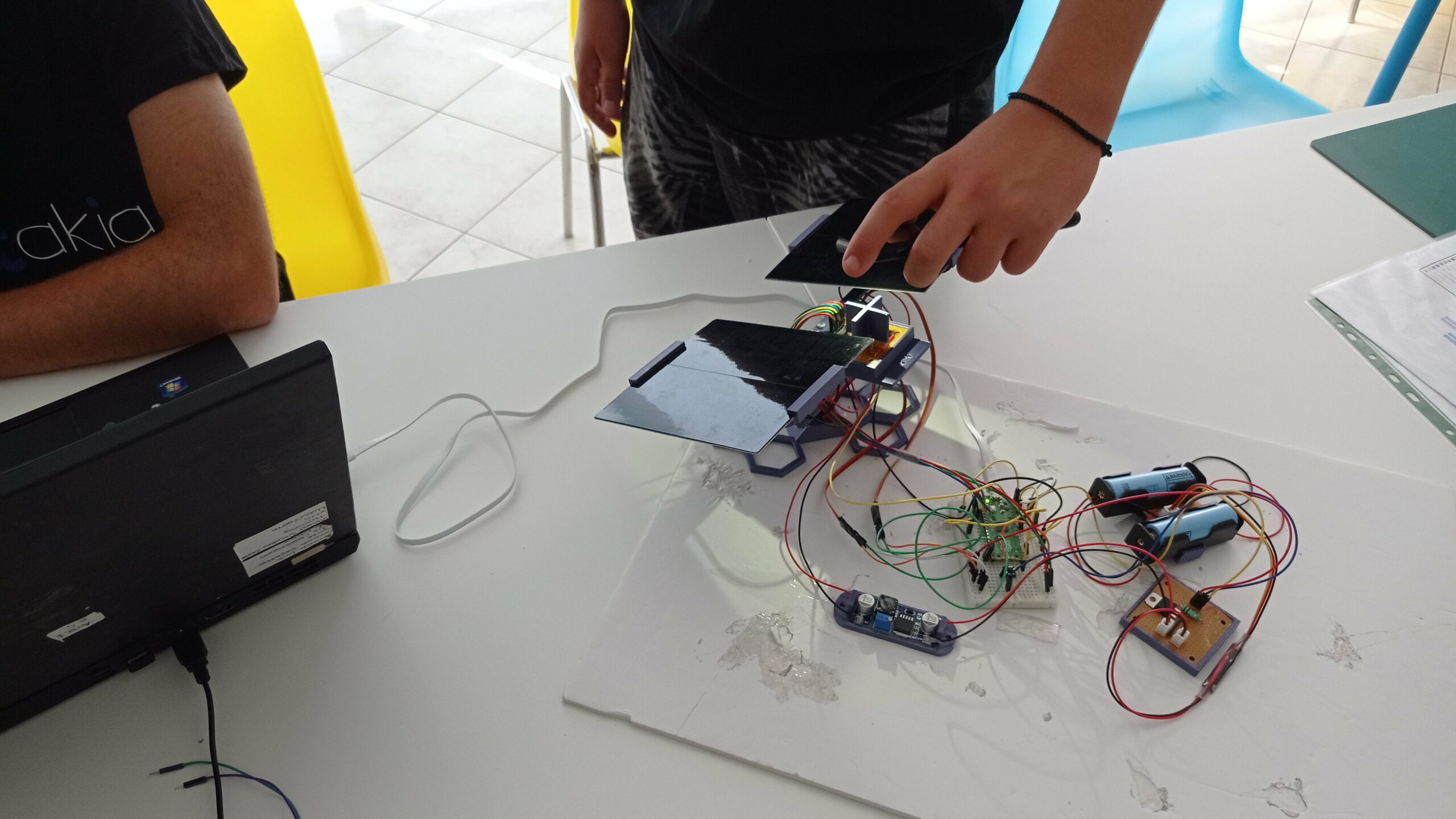
Η υλοποίηση βασίζεται στην τεχνολογία των φωτοβολταϊκών κυψελών και το σύστημα έχει σχεδιαστεί με γνώμονα την μεγιστοποίηση της παραγωγής ενέργειας από τον ήλιο καθ’ όλη τη διάρκεια της μέρας.

Τα χαρακτηριστικά του συστήματός μας είναι τα εξής:
- Μετατροπή ηλιακής ενέργειας σε ηλεκτρική
- Αποθήκευση ενέργειας για μελλοντική χρήση
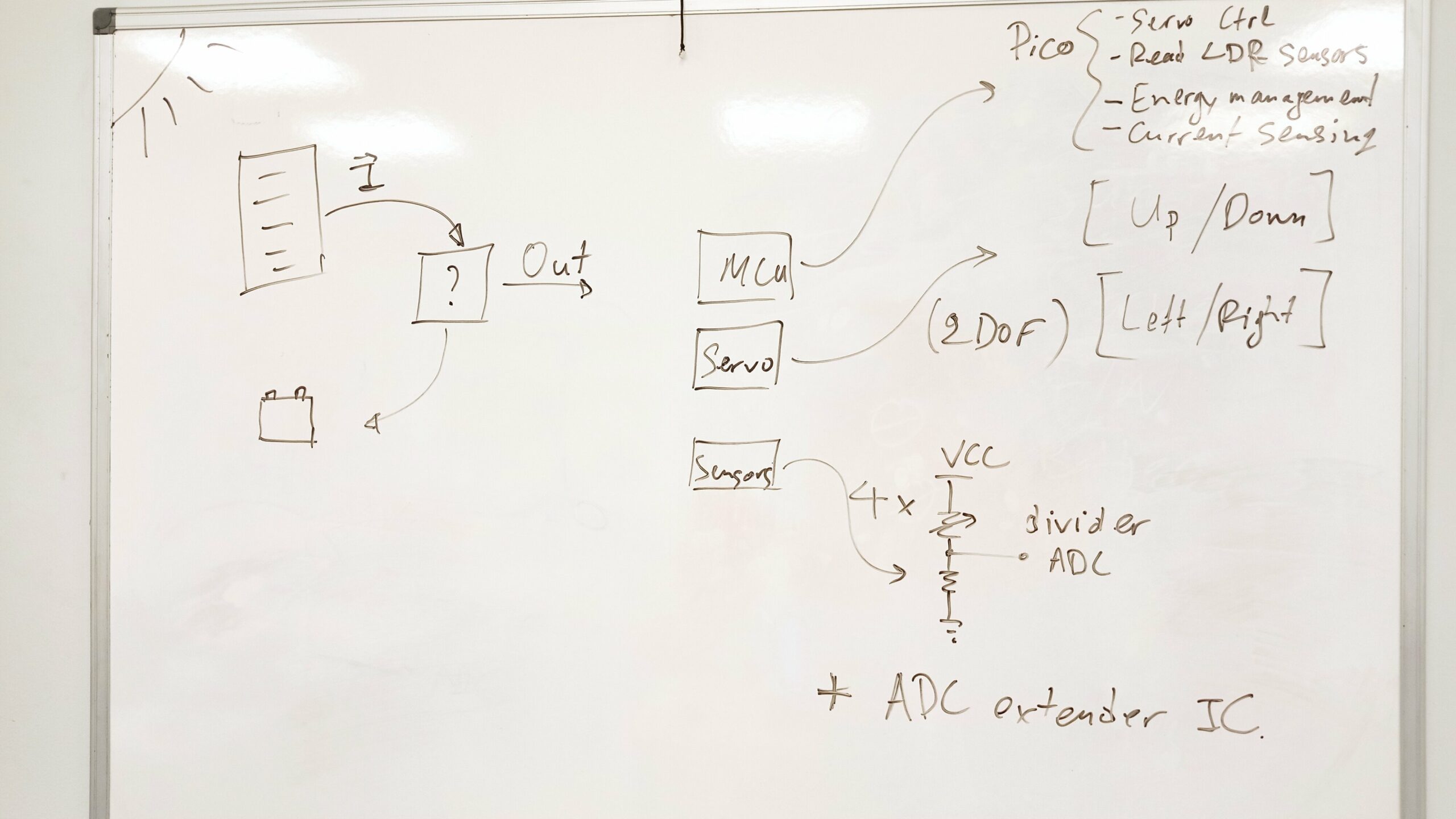
- Αισθητήρες φωτός για αναγνώριση της σχετικής θέσης του ήλιου (LDR)
- Επέκταση αναλογικών εισόδων του Raspberry Pi Pico (MCP3004)
- Βελτιστοποίηση προσανατολισμού του συστήματος ως προς τον ήλιο (δύο βαθμοί ελευθερίας)
- Μέτρηση και παρακολούθηση παραγόμενου ρεύματος
- Υπολογισμός παραγόμενης ισχύος
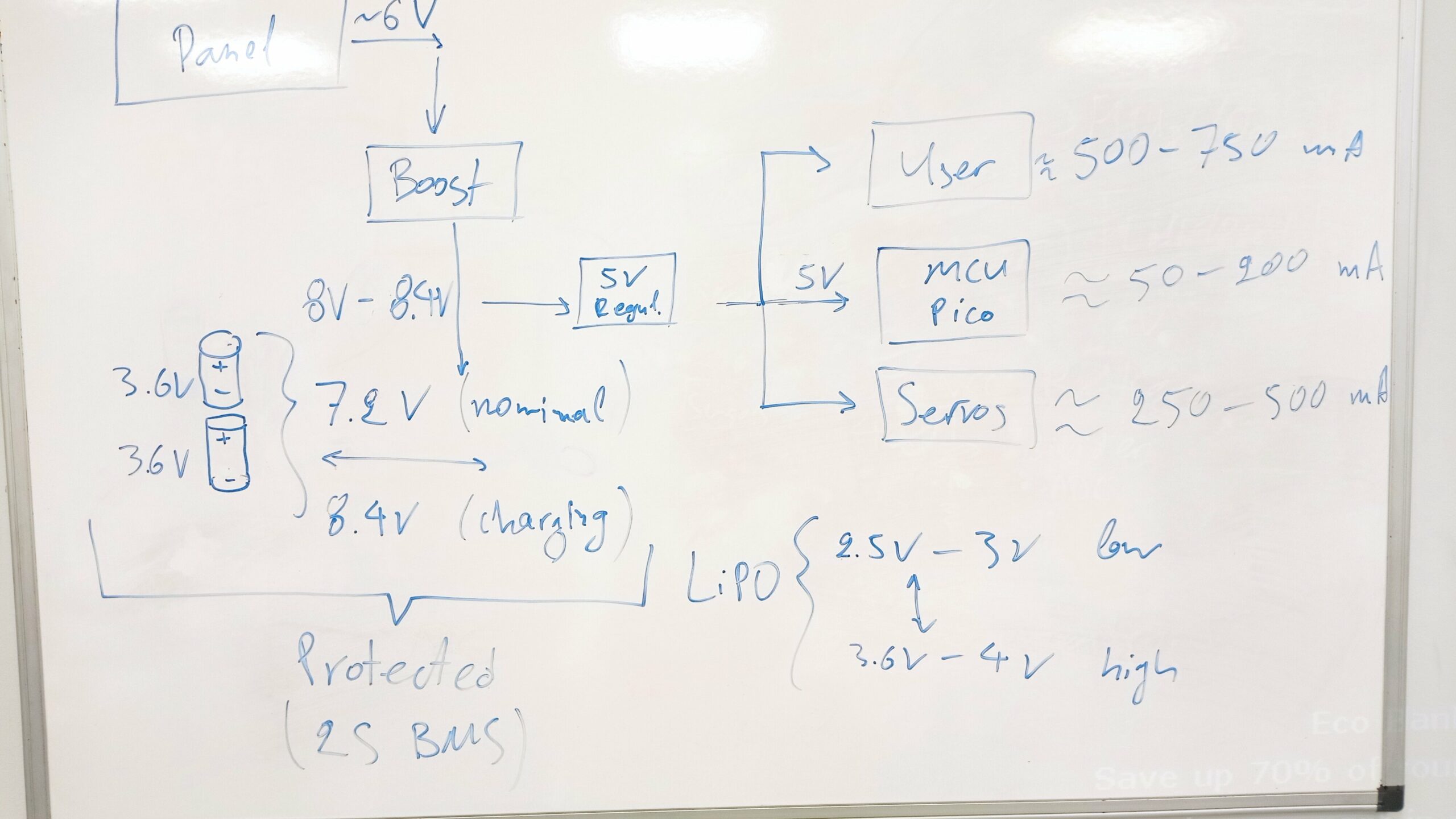
- Ανύψωση παραγόμενης τάσης για φόρτιση
- Προστασία των μπαταριών λιθίου
- Υποβιβασμός και σταθεροποίηση βασικής τάσης λειτουργίας επεξεργαστή
Όλα τα απαραίτητα αρχεία και σημειώσεις για την υλοποίηση και λειτουργία της κατασκευής μπορούν να βρεθούν στο https://github.com/robotakia/robotakia-photon.
Το βίντεο παρουσίασης του συστήματος από τα μέλη της ομάδας μπορεί να βρεθεί στο https://youtu.be/qYPZcm9e8ZM.
Η ομάδα μας!

Δεσύπρης Αλέξης – 1η Γυμνασίου
Δούκας Λεωνίδας – 3η Γυμνασίου
Ζαφειρόπουλος Δημήτρης – 3η Γυμνασίου
Κυριακάκος Αλέξιος – 2α Γυμνασίου
Κωνσταντινίδης Σίμος – 3η Γυμνασίου
Ντάλια Αριάδνη – 1η Γυμνασίου
Ορφανού Σταυριανή – 2α Γυμνασίου
Παναγούτσος Ιωάννης – 1η Γυμνασίου
Τσάτσου Χαρά – 2α Γυμνασίου
Χριστόπουλος Βασίλης – 2α Γυμνασίου
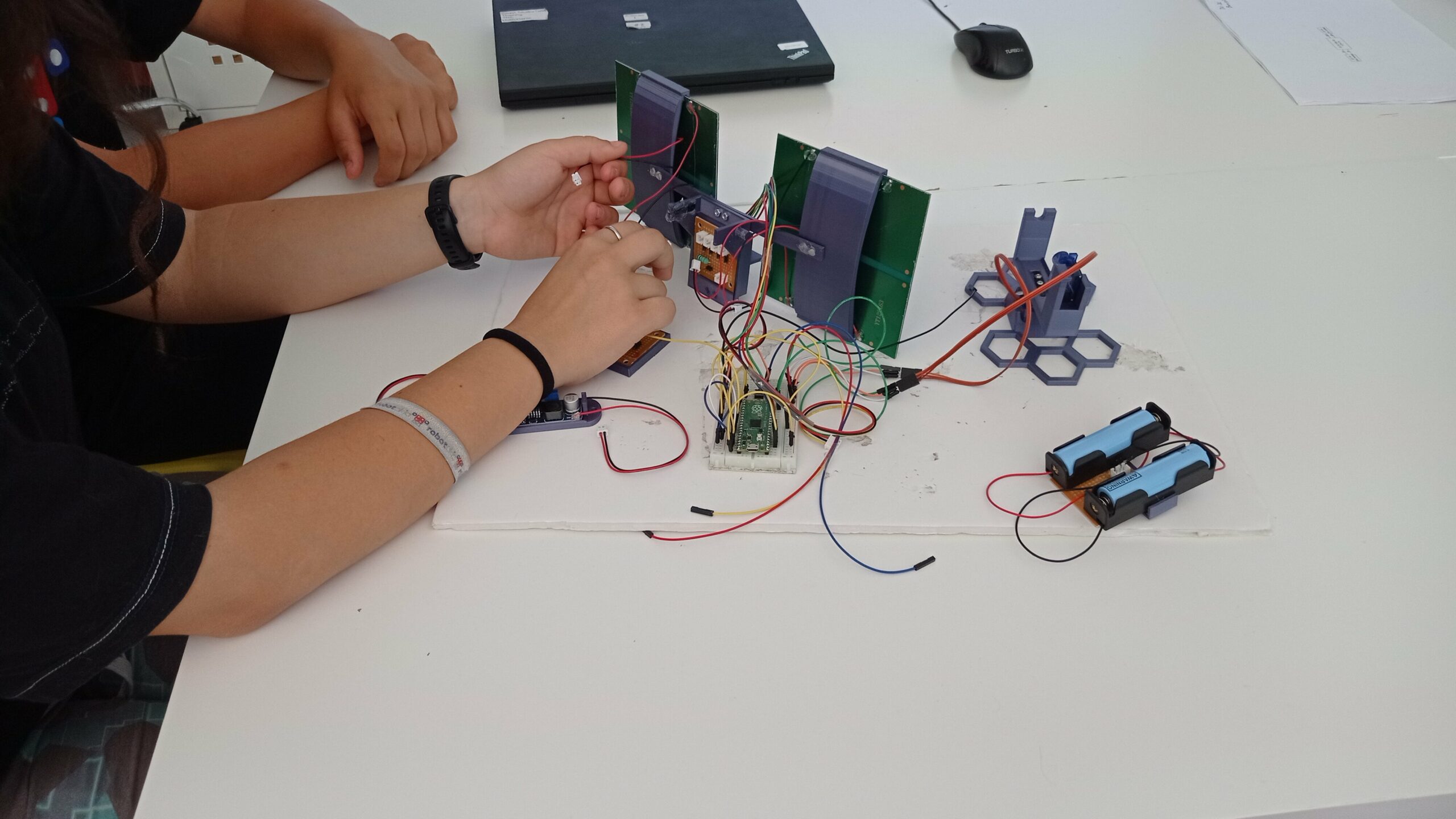
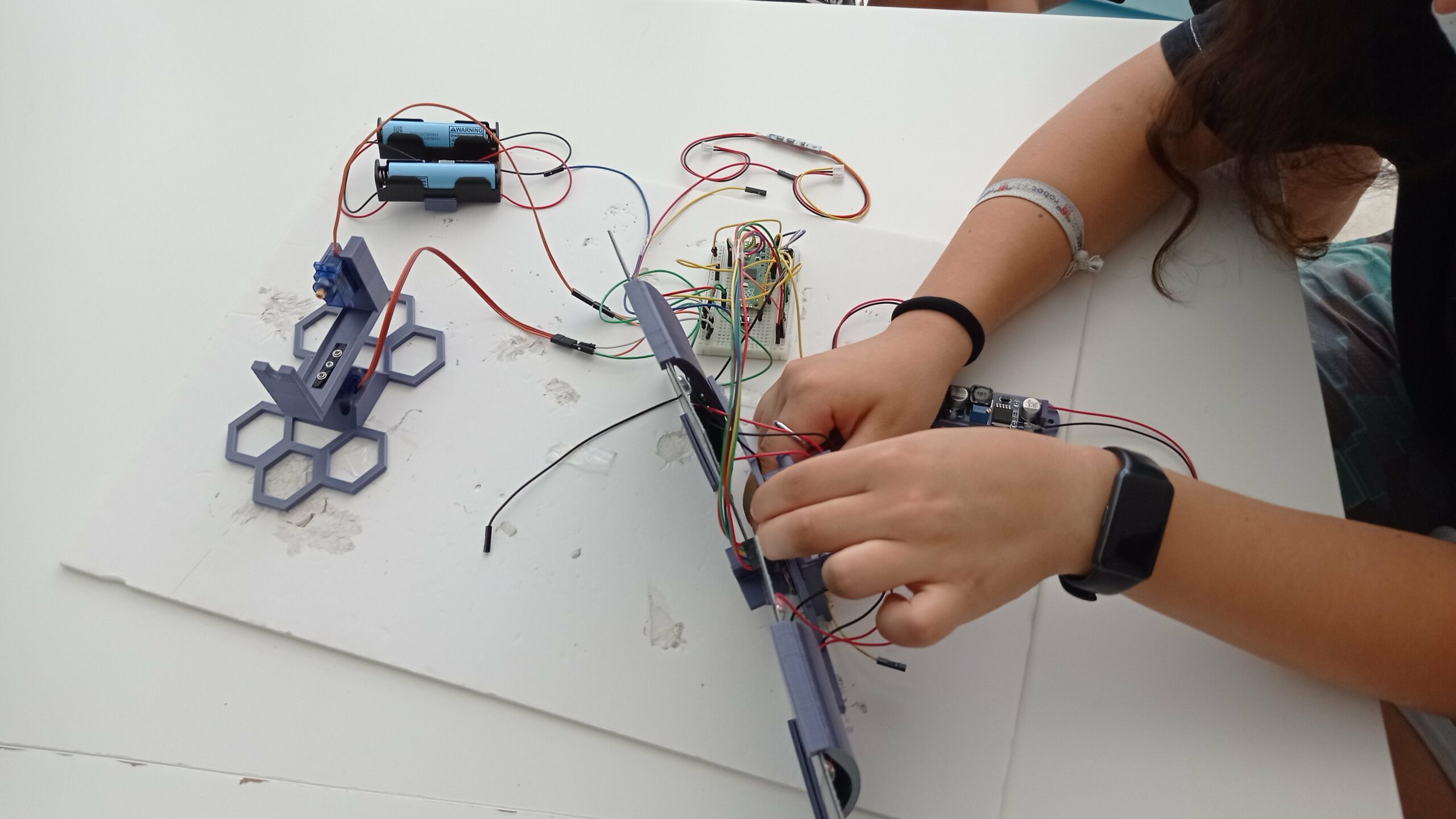
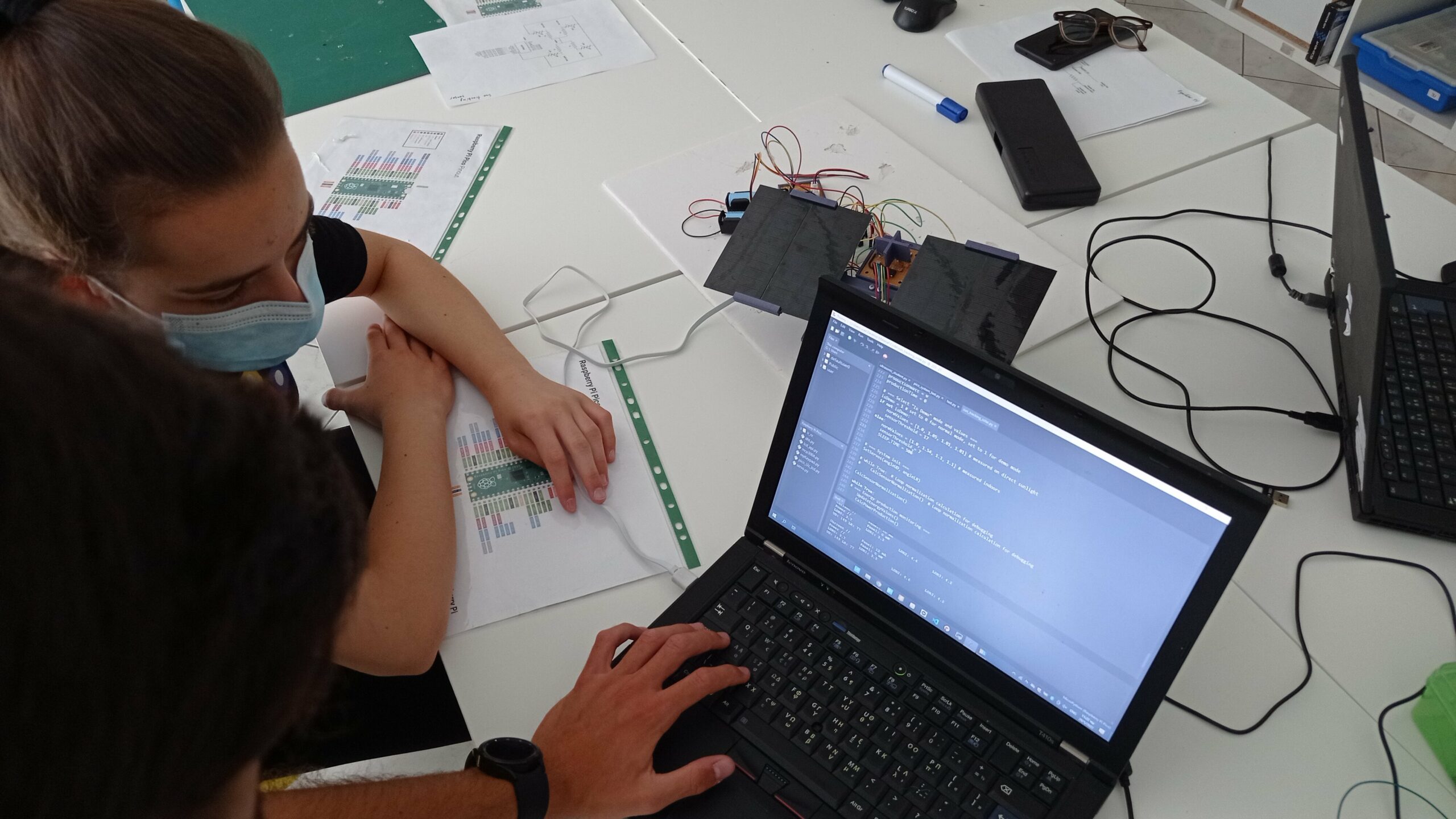
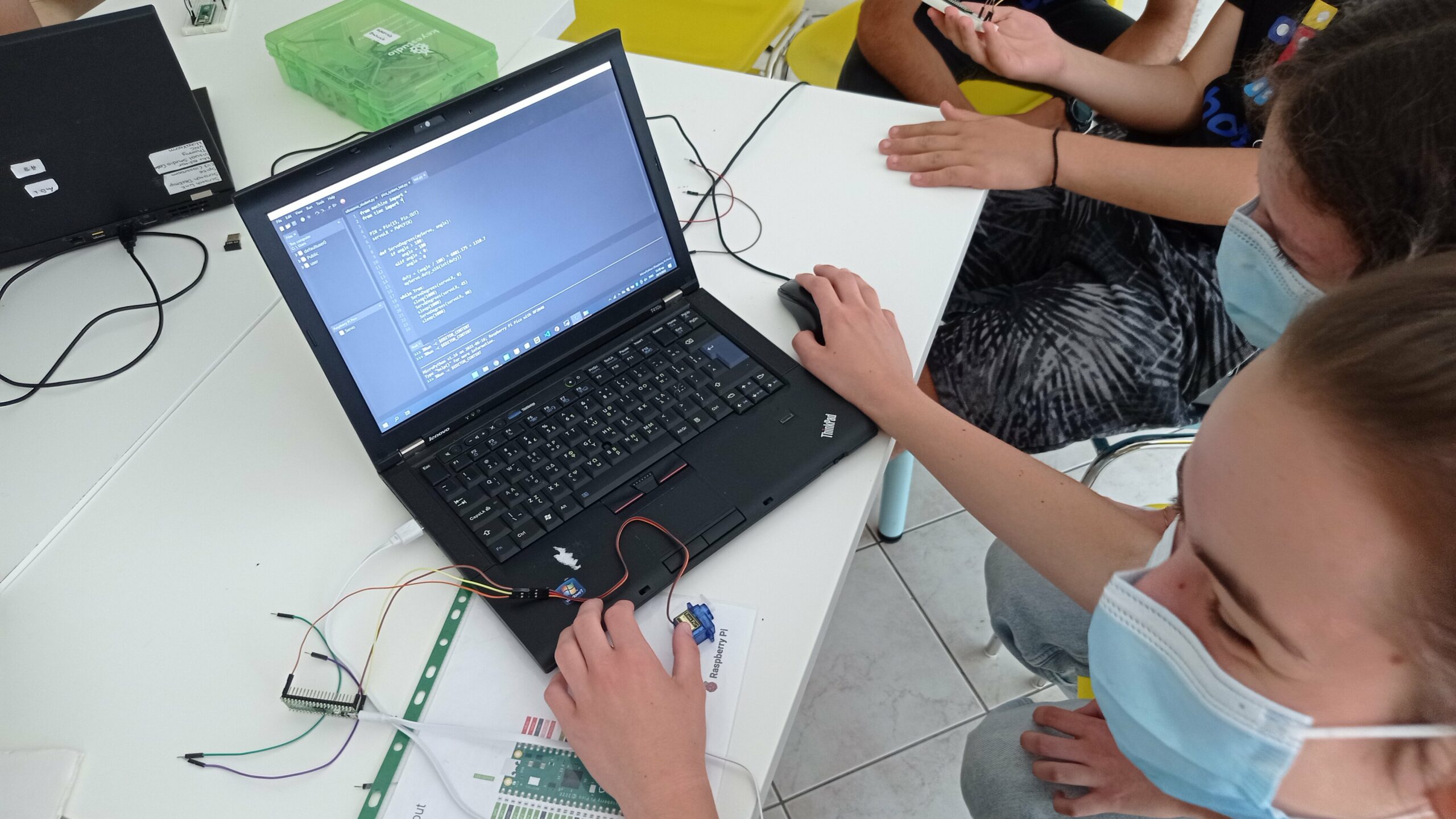
Το σύστημά μας χρησιμοποιεί το Raspberry Pi Pico για την ανάγνωση των αισθητήρων και τον έλεγχο των περιφερειακών.
Ο επιπλέον εξοπλισμός που χρησιμοποιήθηκε είναι ένας τρισδιάστατος εκτυπωτής για τα δομικά μέρη του συστήματός μας και ένας σταθμός συγκόλλησης για την υλοποίηση των κυκλωμάτων σε διάτρητες πλακέτες.
Αρχικές ιδέες και σχεδιασμός
Πειραματισμός

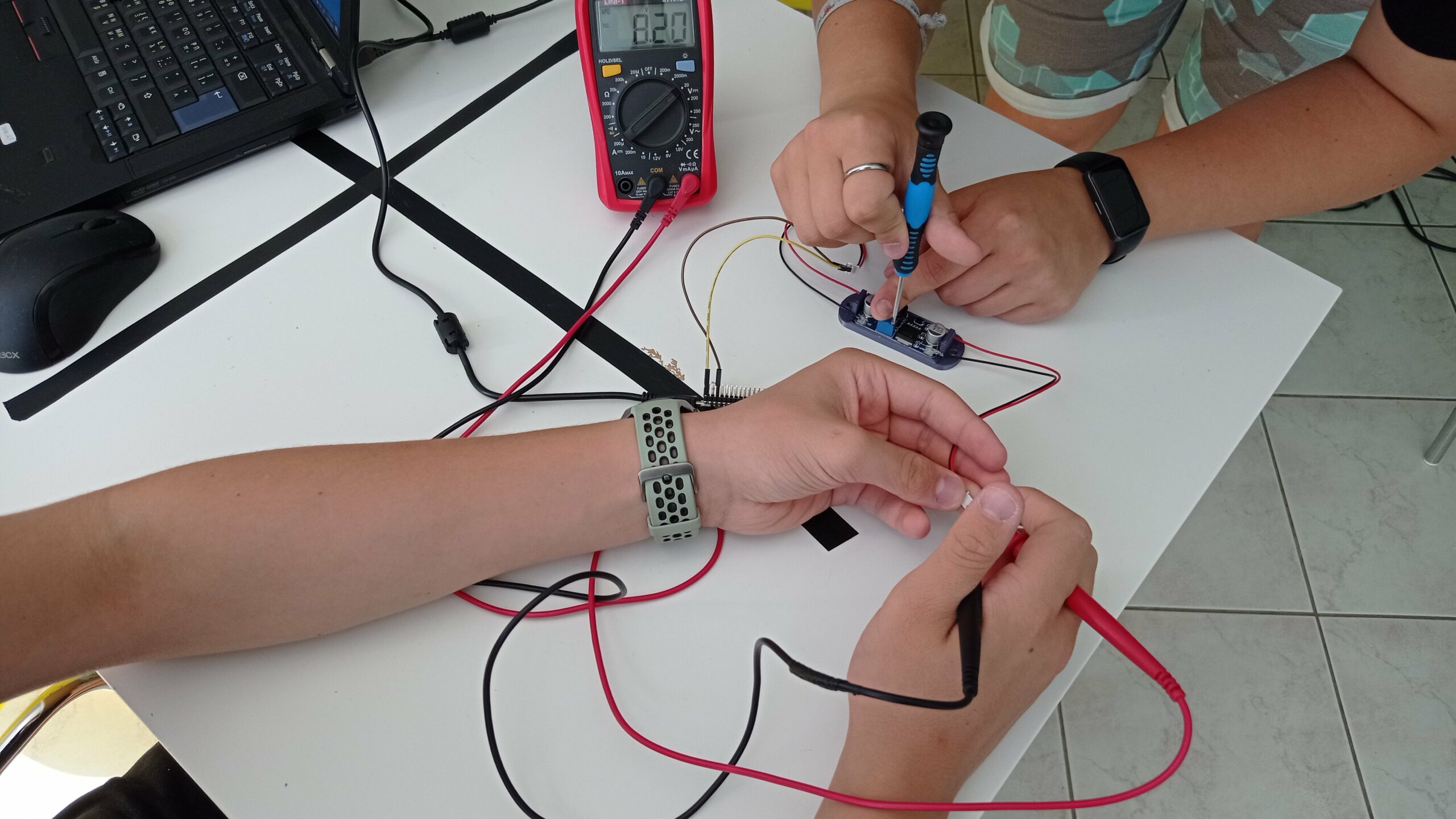
Υλοποίηση