Αναγνώριση φωνής -βοηθός ατόμων με δυσκολία στην κίνηση
Artificial Intelligence assistance -voice command.
Ανοιχτός εκπαιδευτικός πόρος σύμφωνα με OER CANVAS-LINK ΕΔΩ
Φωτογραφίες απο μαθήματα-εργαστήριο-κατασκευές STEM στο λύκειο Βάμου –>link
Μελέτη υπάρχουσας κατάστασης και ορισμός προβλήματος – ανάγκης
Μεγάλη ευκολία παρέχει η αναγνώριση φωνής σε άτομα με δυσκολία στην κίνηση-αναπηρίες όπως και σε κάποιον που θέλει τα χέρια ελεύθερα δίνοντας εντολές στο ρομπότ -βοηθό , που τις πραγματοποιεί. Έτσι η ανάγκη που προκύπτει είναι μια ρομποτική κατασκευή που υπακούει και εκτελεί τις εντολές μας όπως και απαντάει στα ερωτήματά μας .
Το 1ο project ήταν μια κατασκευή η οποία με φωνητικές εντολές ενεργοποιούσε τα φώτα ,ανεμιστήρα κτλ.
Όμως οι συντελεστές –μαθητές δεν ήταν ευχαριστημένοι. Ήθελαν ένα πιο ελκυστικό και διασκεδαστικό project.
Έτσι ως προέκταση του 1ου project προέκυψε το κύριο project μας δλδ ρομπότ- αυτοκινητάκι με αναγνώριση φωνής και τεχνολογία AI το οποίο μπορεί να ανοίξει διάλογο μαζί μας και υπακούει φωνητικές εντολές.
Ένα έργο STEM πρέπει να είναι ελκυστικό προς του μαθητές ,έτσι λοιπόν πέρα από το 1ο προέκυψε το κύριο έργο που διασκέδασε και προίκισε με πολύπλευρες γνώσεις τους μαθητές μας.
ΠΕΡΙΓΡΑΦΗ ΚΟΙΝΩΝΙΚΟΥ ΑΝΤΙΚΤΥΠΟΥ
Ο ενθουσιασμός των παιδιών της ομάδας έχει διεγείρει το ενδιαφέρον της τοπικής κοινωνίας για τα επιτεύγματα της ομάδας ρομποτικής του Λυκείου Βάμου όπως και των συμμαθητών τους που με το συγκεκριμένο έργο πέρασαν ώρες παίζοντας και μαθαίνοντας. Επίσης μαθητές που έχουν παππούδες-γιαγιάδες με δυσκολίες στην κίνηση συνεργάστηκαν με την ομάδα μας για να φτιάξουν βοηθούς που υπακούουν φωνητικές εντολές π.χ. ανοίγουν μια ηλεκτρική συσκευή.Η τελευταία κατασκευή βοηθάει μια γιαγιά με κινητικά προβλήματα στον έλεγχο ηλεκτρικών συσκευών και έγινε όπως το περιγράφουμε παρακάτω -1ο project- με το πρόσθετο ρελέ(relay-link).
Περιγραφή ομάδας μαθητών, τρόπου συνεργασίας και ανάθεσης ρόλων
Η ομάδα αποτελείται από 3 μαθητές της Β λυκείου με ενθουσιασμό και όρεξη για το STEM -ρομποτική.
Ο Μανώλης ασχολήθηκε με το hardware, κυκλώματα κτλ. , η Κατερίνα με το software δλδ κώδικες και η Έλενα παντού βοηθός.
AI τεχνολογία
Στην κατασκευή μας η τεχνολογία AI βρίσκεται στην εφαρμογή mit app inventor που φτιάξαμε για το smartphone , η οποία εκμεταλλεύεται την AI τεχνολογία της Google για την αναγνώριση φωνής.
| Διεύθυνση αποθετηρίου στο Github: |
Στο main branche είναι όλα που χρειάζονται Επιπρόσθετα όμως στα άλλα branche έχω υλικό για αυτούς τους εκπαιδευτικούς που θέλουν να διδάξουν τα επιμέρους στοιχεία του project για την καλύτερη κατανόηση . https://github.com/nektarios25ma/Artificial-Intelligence-assistance–voice-command |
| Λίστα εξοπλισμού: | ΒΙΝΤΕΟ ΠΑΡΟΥΣΙΑΣΗΣ ΤΟΥ ΕΡΓΟΥ:
Το βίντεο δείχνει ένα κλάσμα των δυνατοτήτων του ρομπότ (λόγω της έκτασης που θα καταλάμβανε).. ΥΛΙΚΑ 2Χ BREADBOARD:https://www.hellasdigital.gr/electronics/prototyping/pcb-breadboard/mini-universal-solderless-breadboard-400-tie-points/ arduino uno : https://www.hellasdigital.gr/go-create/arduino/uno-r3-atmega328p-ch340g-mini-usb-board-for-compatible-arduino-diy/ Μπαταριοθήκη : https://www.hellasdigital.gr/electronics/components/2-cells-18650-li-ion-lithium-battery-holder-w-5.52.1mm-dc-power-plug-connector/ ΜΠΑΤΑΡΙΕΣ 18650: https://www.hellasdigital.gr/electronics/batteries/li-ion/panasonic-ncr18650b-battery-18650-3400mah/ ΣΑΣΙ ΡΟΜΠΟΤ: https://grobotronics.com/robot-smart-car-2wd.html €12.90 MOTOR DRIVER: https://grobotronics.com/dual-motor-driver-module-l298n.html €4.20 MP3 Player: https://grobotronics.com/dfplayer-a-mini-mp3-player.html €9.90 Κάρτα μνήμης microSD: Αισθητήρας Υπερήχων: Βάση Στήριξης για Αισθητήρα Υπερήχων: Servo : Σερβο βραχίονα στήριξης για servo SG90: Spacer Ποικιλία : Bluetooth Module for Arduino: ΣΥΝΟΛΟ:90,70€ ΛΟΓΙΣΜΙΚΟ: ARDUINO IDE ΚΑΙ MIT APP INVENTOR |
ΚΑΤΑΣΚΕΥΗ
Στηρίζεται σε δύο κύρια στοιχεία η κατασκευή μας :
α) arduino uno -με σύνδεση σε κύκλωμα- που ελέγχει τη ρομποτική κατασκευή. Υπακούει στις εντολές που λαμβάνει μέσω bluetooth απο το κινητό μας μέσω της εφαρμογής AI που φτιάξαμε και απαντάει στις ερωτήσεις μας.
β)smartphone app- εφαρμογή αναγνώρισης φωνής που φτιάξαμε με τεχνολογία τεχνητής νοημοσύνης. Η εφαρμογή mit app inventor του κινητού κοινοποιήται με σύνδεσμο κοινής χρήσης παρακάτω .
Η εφαρμογή του κινητού (ανοίγω τον σύνδεσμο από το κινητό μου) : https://drive.google.com/file/d/1DAyleREWb_oeiSgXCcUE1LgrkpLdOXdx/view?usp=sharing
1ο βήμα κατασκευής: Αφού πρώτα έχω εγκαταστήσει από το google play την εφαρμογή MIT AI2 Companion (για να μπορώ και μελλοντικά να κατασκευάσω όμοιου τύπου εφαρμογές), εγκαθιστώ την παραπάνω εφαρμογή.Εάν σας βγάλει ειδοποιήση ασφαλείας ότι είναι ιός , δεν είναι. Είναι απλά ελεύθερο και δωρεάν.
2ο βήμα κατασκευής: για το κύριο project συναρμολογώ το κιτ -ρομπότ σύμφωνα με τον σύνδεσμο εδώ.
{kind=link}
3ο βήμα κατασκευής: πάνω στο σασί του ρομπότ
συνδέω τα στοιχεία του κυκλώματος σταδιακά όπως παρακάτω
(υπόψη ότι όλα τα της κατασκευής βρίσκονται στο GITHUB με καλύτερη αναλύση και ευκολία)
Α)Για το ρομπότ που υπακούει –αναγνωρίζει εντολές και κάνει διάλογο αποφάσισα να δώσω τα κυκλώματα διαδοχικά και όχι σε ένα όλα λόγω περιπλοκότητας (έτσι άλλωστε το φτιάξανε και τα παιδιά ):
Κάποια κυκλώματα σχεδιάστηκαν απο μαθητές και εφόσον είναι αναγνώσιμα και κατατοπιστικά τα άφησα ως έχει (δεν τα ωραιοποίησα στο tinkercad ή στο fritzing).
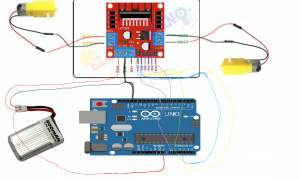
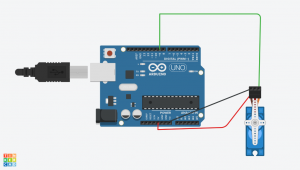
Α)κυρίως κύκλωμα:
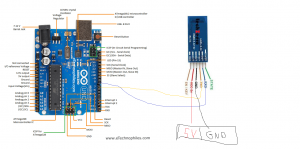
Β) Bluetooth: TX –>8 , RX–>7 ,VCC–>5V ΤΟΥ MOTOR DRIVER,GND ΚΟΙΝΟ ΟΛΩΝ ΜΕ ARDUINO
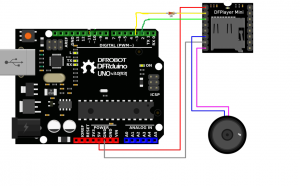
Γ)MP3 –ΗΧΕΙΟ
Δ)ΣΕΡΒΟ : ΤΑ 5VOLT ΚΟΚΚΙΝΟ ΚΑΛΩΔΙΟ ΠΗΓΕ ΤΕΛΙΚΑ ΣΤΑ 5V ΤΟΥ MOTOR DRIVER
Ε)ULTRASONIC
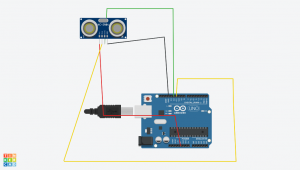
GND ΚΟΙΝΟ ΟΛΩΝ ΜΕ ARDUINO
4ο βήμα κατασκευής:
Ανεβάζω τον παρακάτω κώδικα -είναι και στο github-link
απο όπου προτείνω να κατεβαστεί- στο arduino uno.
Όμως εδώ ο κώδικας έχει περισσότερα σχόλια για την καλύτερη κατανόησή του.
Ενεργοποίηση: 1)εφόσον ανοίγω την τροφοδοσία του ρομπότ –>μας συστήνεται το ρομπότ(φωνητικά) και ενεργοποιήται ταυτόχρονα το bluetooth hc05 που αναβοσβήνει. 2)Έχοντας το κινητό διασυνδεμένο με το internet είτε με δεδομένα είτε με wifi και ανοικτό το bluetooth του ανοίγω τις ρυθμίσεις και στο bluetooth δίκτυο βρίσκω το hc05 και πατάω ζεύξη-σύνδεση με κωδικό (βάζω 1234). Αυτό χρειάζεται μόνο την 1η φορά .3)Απο την εφαρμογή πατάω το σύμβολο του bluetooth και επιλέγω το hc05-connect.Αναβοσβήνει πιο αργά το hc05.Έπειτα αφού πατήσω την φωτογραφία του μικρόφωνου ,λέω την κατάλληλη φράση -βλέπε video -και ανταποκρίνεται το ρομπότ λέγοντας ή κάνοντας.Στο github-link έχω όλες τις φράσεις που υπάρχουν στο πρόγραμμα.ino τις οποίες μπορείται να αλλάξετε για την διασκέδαση των παιδιών και των μεγάλων.
link για το tutorial –>πως προετοιμάζω το mp3 player
Από εδώ και κάτω –>έως τέλους είναι ο κώδικας του κύριου έργου και του 1ου(με το κύκλωμα).
Χρησιμοποιώ το arduino ide 1.8.5
CODE:
#include <SoftwareSerial.h>
#include “Arduino.h”
//για το mp3 player οι παρακάτω 7 γραμμές -επίσης εδώ το link για το tutorial –>πως προετοιμάζω το mp3 player
SoftwareSerial mySerial(2, 3); // RX, TX
# define Start_Byte 0x7E
# define Version_Byte 0xFF
# define Command_Length 0x06
# define End_Byte 0xEF
# define Acknowledge 0x00 //Returns info with command 0x41 [0x01: info, 0x00: no info]
# define ACTIVATED LOW
//για το bluetooth που υπακούει τις εντολές του app
SoftwareSerial BT(7, 8); //TX, RX respetively
String readdata;
unsigned long start_time; // Δημιούργησε μια μεταβλητή τύπου unsigned long integer με όνομα start_time
//απο εδώ και κάτω μέχρι το void setup είναι κώδικας για servo–>
//–>ultrasonic sensor και motor driver
//ultrasonicservo
#include “AlphaBot.h”
//για την βιβλιοθήκη AlphaBot—>
//link:https://www.waveshare.com/wiki/File:AlphaBot_Demo.7z
int ECHO = 12;
int TRIG = 11;
char inByte=0;
int FrontDistance = 0;
int LeftDistance = 0;
int RightDistance = 0;
int ServoPin = 9; //Set the SG90 servo drive pin to digital port 9 ()
int myangle; //Defines the angle variable
int pulsewidth; //Defines the pulse width variable
int val;
AlphaBot Car1 = AlphaBot();
void UltrasonicConfig()
{
pinMode(ECHO, INPUT); // Define the ultrasonic echo input pin
pinMode(TRIG, OUTPUT); // Define the ultrasonic trigger input pin
}
void ServoConfig()
{
pinMode(ServoPin,OUTPUT); //Set the servo output interface
}
float DistanceTest() // Measure the distance
{
digitalWrite(TRIG, LOW); // set trig pin low 2μs
delayMicroseconds(2);
digitalWrite(TRIG, HIGH); // set trig pin 10μs , at last 10us
delayMicroseconds(10);
digitalWrite(TRIG, LOW); // set trig pin low
float Fdistance = pulseIn(ECHO, HIGH); // Read echo pin high level time(us)
Fdistance= Fdistance / 58;
//Y m=(X s*344)/2
//X s=( 2*Y m)/344
//X s=0.0058*Y m
//cm = us /58
//Serial.print(“Fdistance:”); //output distance (Unit: cm)
// Serial.println(Fdistance);
return Fdistance;
}
void DistanceDisplay(int Distance) //display distance
{
if((2<Distance)&(Distance<400)) //Ultrasonic range ranging 2cm to 400cm
{
// Serial.print(“Distance:”); //print distance
// Serial.print(Distance);
// Serial.print(“cm\n\n”);
}
else
{
//Serial.print(“!!! Out of range\n”);
}
delay(250);
}
void ServoPulse(int ServoPin,int myangle) /*Defines an impulse function that is used to simulate PWM generation*/
{
pulsewidth=(myangle*11)+500; //The angle is converted to a pulse width value of 500-2480
digitalWrite(ServoPin,HIGH); //Set the servo Pin level high
delayMicroseconds(pulsewidth); //delay the pulse width value
digitalWrite(ServoPin,LOW); //Set the servo Pin level low
delay(20-pulsewidth/1000); //delay the remaining time of period
}
void FrontDetection()
{
//Here the number of cycles decreased, in order to increase the speed of the car encounter obstacles
for(int i=0;i<=5;i++) //The number of PWM,the equivalent delay to ensure that can go to the response angle
{
ServoPulse(ServoPin,90); //analog out PWM
}
FrontDistance = DistanceTest();
//Serial.print(“FrontDistance:”);
// Serial.println(FrontDistance);
//DistanceDisplay(FrontDistance);
}
void LeftDetection()
{
for(int i=0;i<=15;i++) //The number of PWM,the equivalent delay to ensure that can go to the response angle
{
ServoPulse(ServoPin,140); //analog out PWM
}
LeftDistance = DistanceTest();
//Serial.print(“LeftDistance:”);
//Serial.println(LeftDistance);
}
void RightDetection()
{
for(int i=0;i<=15;i++)
{
ServoPulse(ServoPin,40);
}
RightDistance = DistanceTest();
//Serial.print(“RightDistance:”);
//Serial.println(RightDistance);
}
#define Lpwm_pin 6
#define Rpwm_pin 5
int pinLB=A2;
int pinLF=A3;
int pinRB=A1;
int pinRF=A0;
unsigned char Lpwm_val =115;
unsigned char Rpwm_val =115;
int L=0;
int R=0;
int Car_state=0;
int divtime;
void M_Control_IO_config(void)
{
pinMode(pinLB,OUTPUT);
pinMode(pinLF,OUTPUT);
pinMode(pinRB,OUTPUT);
pinMode(pinRF,OUTPUT);
pinMode(Lpwm_pin,OUTPUT); // (PWM)
pinMode(Rpwm_pin,OUTPUT); // (PWM)
}
void Set_Speed(unsigned char Left,unsigned char Right)
{
analogWrite(Lpwm_pin,Left);
analogWrite(Rpwm_pin,Right);
}
void advance(void) // 前進
{
digitalWrite(pinLB,LOW);
digitalWrite(pinLF,HIGH);
digitalWrite(pinRB,LOW);
digitalWrite(pinRF,HIGH);
Car_state = 1;
}
void turnR(void)
{
digitalWrite(pinRB,LOW);
digitalWrite(pinRF,HIGH);
digitalWrite(pinLB,HIGH);
digitalWrite(pinLF,HIGH);
Car_state = 4;
}
void turnL(void)
{
digitalWrite(pinRB,HIGH);
digitalWrite(pinRF,HIGH);
digitalWrite(pinLB,LOW);
digitalWrite(pinLF,HIGH);
Car_state = 3;
}
void stopp(void) //停止
{
digitalWrite(pinRB,HIGH);
digitalWrite(pinRF,HIGH);
digitalWrite(pinLB,HIGH);
digitalWrite(pinLF,HIGH);
Car_state = 5;
}
void back(void) //後退
{
digitalWrite(pinLB,HIGH);
digitalWrite(pinLF,LOW);
digitalWrite(pinRB,HIGH);
digitalWrite(pinRF,LOW);
Car_state = 2;
}
void setup() {
BT.begin(9600);
mySerial.begin(9600);
Serial.begin(9600);
M_Control_IO_config();
Set_Speed(Lpwm_val,Rpwm_val);
stopp();
UltrasonicConfig();
ServoConfig();
FrontDetection();
playSecond();
// playFifthb(); //Το όνoμά μου είναι arduino
delay(300);
}
//———————————————————————–//
void loop() {
BT.listen();
FrontDetection();
Set_Speed(Lpwm_val,Rpwm_val);
while (BT.available()){ //Check if there is an available byte to read
delay(10); //Delay added to make thing stable
char c = BT.read(); //Conduct a serial read
readdata += c; //build the string- “forward”, “reverse”, “left” and “right”
}
if (readdata.length() > 0) {
Serial.println(readdata); // print data to serial monitor
//το παρακάτω στοιχείο (readdata == “A”) όπως και τα όμοια του ..
//στις επόμενες εντολές είναι εξτρα στοιχεία για να μπορούμενα….
//ελένχουμε το ρομπότ και με άλλο τρόπο…
if((readdata == “go”)|| (readdata == “μπροστά”)|| (readdata == “προχώρα”)||(readdata == “A”))
{
FrontDetection();
advance();
delay(7000);
}
else if((readdata == “stop”) || (readdata == “σταμάτα”)||(readdata == “σταμάτησε”)||(readdata == “σεμνά”)||(readdata == “L”))
{
stopp();
}
else if ((readdata == “πίσω”)||(readdata == “back”)||(readdata == “B”))
{
back();
delay(2000);
}
else if (( readdata == “right”)||(readdata == “δεξιά”)||(readdata == “P”))
{
turnR();
delay(3000);
}
else if ((readdata == “αριστερά”) || (readdata == “left”)||(readdata == “ζερβά”)||(readdata == “N”))
{
turnL();
delay(3000);
}
else if ((readdata == “είσαι ελεύθερο”) || (readdata == “ελεύθερο”)||(readdata == “απόφυγε εμπόδια”)||(readdata == “free”))
{
FrontDetection();
start_time=millis();
while ((millis() – start_time < 14000UL) && (FrontDistance > 4 )) { // Εφόσον δεν πέρασαν 24 δευτ και η απόσταση απο εμπόδιο είναι μεγαλύτερη απο 4cm κάνε:
FrontDetection();
if(FrontDistance < 32) //there is an obstacle
{
back();
delay(200);
stopp(); //stop
delay(200);
LeftDetection(); //Measure the distance to the left obstacle
DistanceDisplay(LeftDistance); //display distance
RightDetection(); //Measure the distance to the right obstacle
DistanceDisplay(RightDistance); //display distance
if((LeftDistance < 35 ) &&( RightDistance < 35 )) //When the left and right sides are relatively close by the obstacles
{
turnL(); //Turn around
delay(70);
}
else if(LeftDistance > RightDistance) //The left is far more than the right
{
turnL(); //Turn left
delay(300);
stopp(); //stop
delay(100);
}
else //The right is far more than the left
{
turnR(); //turn right
delay(300);
stopp(); //stop
delay(100);
}
}
else
{
advance(); //there is no objtacle ,go straight
playten();
}
}
}
else if (( readdata == “κύκλος”) || (readdata == “circle”)||(readdata == “C”))
{
Set_Speed(75,255);
advance();
delay(8000);
}
else if ((readdata == “Πώς σε λένε”) || (readdata == “ποιο είναι το όνομά σου”)||(readdata == “όνομα”)||(readdata == “What is your name”))
//if ((readdata == “Πως σε λένε”) || (readdata == “ποιο είναι το όνομά σου”)||(readdata == “όνομα”)||(readdata == “What is your name”))
{
playSecond();
delay(3000);
}
else if ((readdata == “Ποιος σε έφτιαξε”) || (readdata == “ποιος είναι ο κατασκευαστής σου”)||(readdata == “ο δημιουργός σου”)||(readdata == “your Creator”)||(readdata == “kreator”))
{
playThird();
delay(3000);
}
else if ((readdata == “Πες ένα ανέκδοτο”) || (readdata == “Πες ένα αστείο”)||(readdata == “Tell me a joke”)||(readdata == “πες κάτι”))
{
playFourth();
delay(3000);
}
else if ((readdata == “ποιο είναι το καλύτερο σχολείο”))
{
playFifth();
delay(3000);
}
else if ((readdata == “You are the best”)|| (readdata==”μπράβο” ))
{
playFifthb();
delay(3000);
}
else if ((readdata == “Ποιοι είναι οι φίλοι σου”)|| (readdata==”οι φίλοι σου” )|| (readdata==”η φίλη σου” ))
{
playsix();
delay(3000);
}
else if ((readdata == “τι είπε ο Αϊνστάιν”)|| (readdata==”κάτι που είπε ο Αϊνστάιν” )|| (readdata==”Αϊνστάιν” ))
{
playseven();
delay(3000);
}
else if ((readdata == “ποια είναι η διακρίνουσα”)|| (readdata==”Πες την διακρίνουσα” )|| (readdata==”διακρίνουσα” ))
{
playeight();
delay(3000);
}
else if ((readdata == “Πόσο κάνει 1+1″)|| (readdata==”πόσο κάνει” )|| (readdata==”Πόσο κάνει” ))
{
playnine();
delay(3000);
}
FrontDetection();
readdata=””;}
} //Reset the variable
//ΓΙΑ ΤΑ MP3
void playFirst()
{
execute_CMD(0x3F, 0, 0);
delay(2500);
setVolume(30);
delay(500);
}
void playFirstb()
{
execute_CMD(0x03, 0, 0);
delay(2500);
setVolume(30);
delay(500);
}
void playFifthb()
{
execute_CMD(0x03, 0, 5);
delay(4500);
setVolume(30);
delay(500);
}
void playFifth()
{
execute_CMD(0x03, 0, 4);
delay(6500);
setVolume(30);
delay(50);
}
void playSecond()
{
execute_CMD(0x03, 0, 1);
delay(7000);
setVolume(30);
delay(50);
}
void playThird()
{
execute_CMD(0x03, 0, 2);
delay(6500);
setVolume(30);
delay(50);
}
void playFourth()
{
execute_CMD(0x03, 0, 3);
delay(8000);
setVolume(30);
delay(50);
}
void playsix()
{
execute_CMD(0x03, 0, 6);
delay(13000);
setVolume(30);
delay(50);
}
void playseven()
{
execute_CMD(0x03, 0, 7);
delay(14000);
setVolume(30);
delay(50);
}
void playeight()
{
execute_CMD(0x03, 0, 8);
delay(14000);
setVolume(30);
delay(50);
}
void playnine()
{
execute_CMD(0x03, 0, 9);
delay(14000);
setVolume(30);
delay(50);
}
void playten()
{
execute_CMD(0x03, 0, 10);
delay(4000);
setVolume(30);
delay(50);
}
void pause()
{
execute_CMD(0x0E,0,0);
delay(500);
}
void play()
{
execute_CMD(0x0D,0,1);
delay(500);
}
void setVolume(int volume)
{
execute_CMD(0x25, 0, volume); // Set the volume (0x00~0x30)
delay(1000);
}
void execute_CMD(byte CMD, byte Par1, byte Par2)
// Excecute the command and parameters
{
// Calculate the checksum (2 bytes)
word checksum = -(Version_Byte + Command_Length + CMD + Acknowledge + Par1 + Par2);
// Build the command line
byte Command_line[10] = { Start_Byte, Version_Byte, Command_Length, CMD, Acknowledge,
Par1, Par2, highByte(checksum), lowByte(checksum), End_Byte};
//Send the command line to the module
for (byte k=0; k<10; k++)
{
mySerial.write( Command_line[k]);
}
}
Τέλος για αυτούς που θέλουν το απλό 1ο project φωνητικού ελέγχου συσκευών : (το κύκλωμα στο τέλος ή στο github)
Β)Το πρόγραμμα του arduino για απλό έλεγχο συσκευών-led συμβολικά:
#include <SoftwareSerial.h>
SoftwareSerial BT(10, 11); //TX, RX respetively
String readdata;
void setup() {
BT.begin(9600);
Serial.begin(9600);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT); //
pinMode(5, OUTPUT); //
// pinMode(6, OUTPUT); //
}
//———————————————————————–//
void loop() {
while (BT.available()){ //Check if there is an available byte to read
delay(10); //Delay added to make thing stable
char c = BT.read(); //Conduct a serial read
readdata += c; //build the string- “forward”, “reverse”, “left” and “right” }
if (readdata.length() > 0) {
Serial.println(readdata); // print data to serial monitor
if((readdata == “light on”)|| (readdata == “Light ON”))
{
digitalWrite(3, HIGH);
}
else if((readdata == “light off”) || (readdata == “light off”)) //δέχεται και ελληνικές φράσεις
{ digitalWrite(3, LOW);
}
else if (readdata == “fan on”)
{
digitalWrite (4,HIGH);
}
else if ( readdata == “fan off”)
{
digitalWrite (4, LOW);
}
else if ((readdata == “tv on”) || (readdata == “TV On”))
{
digitalWrite (5, HIGH);
}
else if (( readdata == “tv off”) || (readdata == “TV off”))
{
digitalWrite (5, LOW);
}
readdata=””;}} //Reset the variable
ΚΥΚΛΩΜΑ,link:
.png){kind=link}
ΠΗΓΕΣ
1)LINK :https://www.arduino.cc/en/Tutorial/HomePage
2)LINK :http://mitappsinventor.blogspot.com/p/blog-page.html