To Πρόβλημα:
Και ποιος δεν έχει ακουστά το όνομα Καρέτα – Καρέτα. Αυτό το αγαπημένο είδος θαλάσσιας χελώνας, το οποίο εδώ και καιρό κινδυνεύει υπό εξαφάνιση. Παρότι οι συγκεκριμένες χελώνες, αφού μεγαλώσουν μπορούν να διανύσουν τεράστιες αποστάσεις εντός νερού, ταξιδεύοντας σε θάλασσες και ωκεανούς, χρειάζονται συγκεκριμένες παραλίες για να γεννήσουν τα αβγά τους. Ορισμένες από αυτές τις παραλίες, μεταξύ άλλων λόγω των κατάλληλων θαλάσσιων ρευμάτων και της αμμώδους τους σύστασης βρίσκονται και στην Ελλαδα με τις σημαντικότερες να εντοπίζωνται στη Ζάκυνθο και στην Κυπαρίσσια.
Πιο συγκεκριμένα, τα επί μέρους προβλήματα που εμποδίζουν είτε τα αβγά να εκκολαφθούν, είτε τα νεογνά χελωνάκια να φτάσουν στην θάλασσα, σε περίπτωση που τα αβγά καταφέρουν να μείνουν σώα για το απαραίτητο χρονικό διάστημα, είναι τα εξής:
- Ένα από τα βασικά προβλήματα στον κύκλο αναπαραγωγής της χελώνας είναι η ακούσια καταπάτηση από περαστικά ζώα ή ανθρώπους των ίδιων των αβγών, καθώς και η εισαγωγή νέων θηρευτών στην τροφική αλυσίδα.
- Το ανθρώπινο δυναμικό που απασχολείται ενεργά με την προστασία του είδους, αποτελείται κυρίως από εθελοντές, οι οποίοι, παρά τα αξιοσημείωτα αποτελέσματα της δουλειάς τους, δεδομένης της μη κερδοσκοπικής προσέγγισης, καταναλώνουν σημαντικά ποσοστά της ενέργειάς και του χρόνου τους, ενώ με βάση την εθελοντική τους ιδιότητα οι αριθμοί τους είναι ιδιαίτερα μεταβλητοί με τον χρόνο, ενώ οι παραλίες ενδιαφέροντος είναι συνήθως είτε μεγάλες σε έκταση είτε και διασκορπισμένες σε μία ευρύτερη περιοχή.
- Εξίσου σημαντικό πρόβλημα αποτελεί ή φωτορύπανση και ηχορύπανση των περιοχών κοντά στις παραλίες ωοτοκίας, με τα εν λόγω ερεθίσματα να έχουν την δυνατότητα να αποπροσανατολίσουν τα νεογνά, σε περίπτωση που τα αβγά καταφέρουν να εκκολαφθούν, πριν αυτά φτάσουν στη θάλασσα.
- Τέλος, λόγω της κλιματικής αλλαγής και της υπερθέρμανσης του πλανήτη, τα τελευταία χρόνια παρατηρούνται όλο και περισσότερα ακραία καιρικά φαινόμενα, όπως έντονες παλίρροιες και ακραίες βροχοπτώσεις, οι οποίες μπορεί να παρασύρουν την άμμο και τα αβγά πριν προλάβουν να εκκολαφθούν.
Επομένως, σκοπεύουμε να προστατεύσουμε τα αβγά και τα χελωνάκια, κατασκευάζοντας ένα αυτόνομο όχημα το οποίο θα δραστηριοποιείται, επιβλέποντας για τυχόν κινδύνους και ενημερώνοντας την κοντινότερη εθελοντική οργάνωση διευκολύνοντας έτσι το έργο τους.
Η Λύση μας:
Υπήρξαν αρκετές ιδέες σχεδιασμού, διαφορετικές μεταξύ τους από τα μέλη της ομάδας.

Εν τέλη καταλήξαμε στο Ρομποτ μας “Leonardo” είναι ένα αυτόνομο όχημα, το οποίο είναι σε θέση να κινείται σε μία αμμώδη παραλία ενώ παράλληλα διαθέτει μία ποικιλία αισθητήρων, οι οποίοι καταγράφουν κάθε στιγμή το Περιβάλλον και ενημερώνουν μέσω Wi-Fi την κοντινότερη εθελοντική δομή προστασίας άγριων ζώων, σε περίπτωση που αναγνωριστεί κίνδυνος. Το Ρομπότ μας έχει σχεδιαστεί ώστε να φορτίζει κατά την διάρκεια της μέρας το Power Bank που τροφοδοτεί το Raspberry Pi, ώστε να μπορεί να λειτουργήσει η κάμερα κατά την διάρκεια της νύχτας, η οποία θα μπορεί να εντοπίζει πιθανούς κινδύνους.

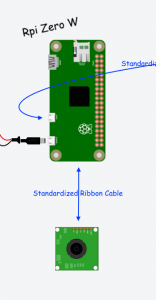
Το Ρομπότ μας έχει δύο “εγκεφάλους” το Raspberry Pi Zero W, το οποίο διαχειρίζεται την επικοινωνία μεταξύ του Συστήματός μας και κάποιου Router ή Ανοιχτού Hotspot στην κοντινή περιοχή και επομένως μέσω internet μπορει να στείλει μνήματα και ειδοποιήσεις στην δομή προστασίας. Το Raspberry επίσης διαχειρίζεται το αρκετά περίπλοκο κομμάτι της Υπολογιστικής Όρασης και για αυτό το λόγο είναι αναγκαίο κομμάτι της κατασκευής μας. Χρησιμοποιώντας την βιβλιοθήκη υπολογιστικής όρασης Open-CV μπορούμε να αντλούμε δεδομένα από την υπέρυθρη κάμερα νυχτερινής όρασης αρκετά γρήγορα για να γίνεται μια υποτυπώδη αναγνώριση.
Το Arduino από την άλλη είναι υπεύθυνο για τους απλούστερους αισθητήρες και την ενεργοποίηση των κινητήρων. Το Arduino τροφοδοτείται από μια μη επαναφορτιζόμενη μπαταρία καθώς η ενέργεια κατανάλωσης των κινητήρων είναι αρκετά μεγαλύτερη από αυτή που θα μπορούσε να μας προσφέρει ένα solar panel. Το όχημα για να διατηρεί ενέργεια, ώστε να μην αδειάσει γρήγορα χωρίς να προλάβει κάποιος εθελοντής να αντικαταστήσει την μπαταρία, θα πρέπει να κινείται όσο το δυνατόν λιγότερο κατά τις περιόδους περιπολίας του. Οι αισθητήρες από την άλλη καταναλώνουν αρκετά μικρά ποσά ενέργειας ώστε να μην μας επηρεάζουν ιδιαίτερα τον χρόνο ζωής της μπαταρίας.
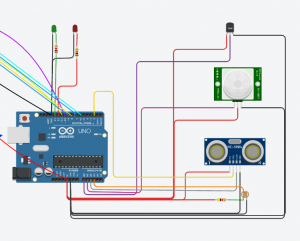
Το Κύκλωμα των αισθητήρων απαρτίζεται από:
- Έναν αισθητήρα PIR, ο οποίος είναι σε θέση να ανιχνεύσει κίνηση από κάποιο θερμόαιμο ζώο και να ενημερώσει τη δομή προστασίας εάν αυτό γίνει επανειλημμένα, κοντά στις φωλιές.
- Έναν αισθητήρα απόστασης υπερήχων, ο οποίος θα βοηθήσει το Ρομπότ στην κίνηση του σε περίπτωση που υπάρχουν αναπάντεχα εμπόδια στην παραλία ώστε να μπορεί να τα αποφύγει, χωρίς να συγκρουστεί.
- Έναν αισθητήρα Θερμοκρασίας ο οποίος θα ενημερώσει τη δομή προστασίας σε περίπτωση βλάβης του συστήματος και επικείμενης υπερθέρμανσης του για να αποφευχθεί πιθανή καταστροφή του εξοπλισμού και ρύπανση της παραλίας.
- Ο φωτοαντιστάτης δρα σαν αισθητήρας φωτός, ο οποίος ανιχνεύει πότε έχει πέσει ο ήλιος ώστε να σταλεί το απαραίτητο μήνυμα στο Raspberry το οποίο θα ξυπνήσει από την κατάσταση νάρκης, στην οποία θα βρίσκεται κατά τη μέρα, και θα ενεργοποιήσει την νυχτερινή του κάμερα για να μπορούμε να παρακολουθούμε με μεγαλύτερη ακρίβεια την παραλία για τυχόν καταπατήσεις και νυχτερινούς θηρευτές το χώρο κοντά στις φωλιές.
Τα δύο LED μπορούν να επισημάνουν αφενός κανονική λειτουργία με το πράσινο LED, και αφετέρου ύπαρξη προβλήματος στο Ρομποτ με το κόκκινο LED. Επίσης και τα δύο LED μπορούν να αναβοσβήσουν ταχύτατα σε περίπτωση εντοπισμού κάποιου νυχτερινού θηρευτή για να τρομάξουν το ζώο μακριά από τα αβγά.
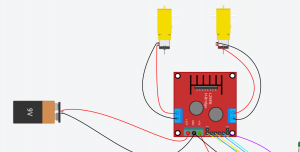
Οι κινητήρες από την άλλη για να λειτουργήσουν χρειάζονται το βοηθητικό κύκλωμα του Driver ώστε από την μικρότερη τάση του Arduino να μπορέσουμε να ελέγξουμε την μεγαλύτερη τάση με περισσότερο ρεύμα που ζητάνε τα μοτέρ για να λειτουργήσουν ικανοποιητικά. Μέσω του Driver μπορούμε να ελέγξομε τόσο την κατεύθυνση όσο και την ταχύτητα του κάθε κινητήρα.
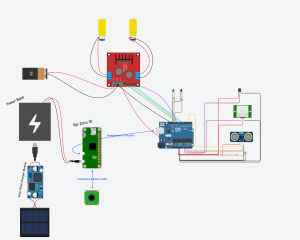
Ολοκληρωμένα το κύκλωμα του Ρομποτ μας φαίνεται παρακάτω:
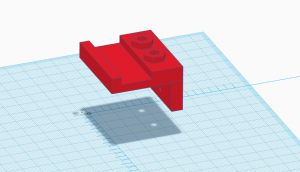
Η κάμερα θα στηριχθεί στην κατασκευή με χρήση αυτοσχέδιας τρισδιάστατα τυπωμένης πιάστρας φτιαγμένης από δύο κομμάτια του ακόλουθου σχεδίου.
Υλικά Κατασκευής:
Βάση:
- Βίδες & Παξιμάδια
- Πλάκα Plexiglass A4
- Φύλλο αλουμινίου
- Χαρτόνι
- Πλατιές Πλαστικές Ρόδες
Ηλεκτρονικά:
- Raspberry Pi Zero W
- Raspberry Pi Zero Night Camera
- 4x Κινητήρας DC
- Motor Driver
- Αισθητήρας Απόστασης Ultrasonic
- Αισθητήρας Θερμοκρασίας και Υγρασίας
- Φωτοαντιστάτης
- Solar Panel
- Solar Battery Charger Module
- Θήκη Μπαταρίας
- Power Bank 5V 2A
- 2x LEDs
- Καλλώδια
- Αντιστάτες
- Μπαταρία 9V
Εργαλεία που Χρησιμοποιήθηκαν:
- 3D – Printer
- Συμβατικός Εκτυπωτής
- Πιστόλι Σιλικόνης
- Δράπανο
- Ψαλίδι
- Πένσα
Λογισμικό που Χρησιμοποιήθηκε:
- TinkerCAD
- Paint.net
- Google Drawings
- Arduino IDE
- Draw.io
- Fritzing
Η ομάδα μας :
Η ομάδα μας αποτελείται από μαθητές Δημοτικών σχολείων της Πάτρας, μέλη της δράσης εκπαιδευτικής ρομποτικής “Robots@ΜΕΤ” του Πανεπιστημίου Πατρών.
Ομάδα:
- Αθανασόπουλος Ηλίας
- Ανδριόπουλος Νίκος – Ευστράτιος
- Γεωργόπουλος Γιώργος
- Γιατράς Βασίλης
- Χρόνης Θανάσης
Προπονητής Διαγωνισμού:
- Τζουβελέκης Δημήτρης-Άγγελος