Περιγραφή
Υλοποίηση ενός πολυμορφικού Rover το οποίο θα εξυπηρετεί διάφορους σκοπούς και θα μπορεί να τροποποιείται ανάλογα τις συνθήκες χρήσης. Πιο συγκεκριμένα θα υπάρχει ο βασικός κορμός ενός Rover και στην βάση-σασί θα υπάρχει η δυνατότητα πρόσθεσης ή αφαίρεσης αισθητήριων και εξαρτημάτων, σαν modules, ανάλογα με τις συνθήκες που θα χρησιμοποιηθεί το Rover. Το κύριο/σταθερό σώμα του Rover θα είναι προγραμματισμένο βασισμένο στη λογική της τεχνητής νοημοσύνης ανεξαρτήτως των Modules. To εσωτερικό θα μπορεί να αλλάζει ανάλογα τις αποστολές που θα εκτελεί το Rover.
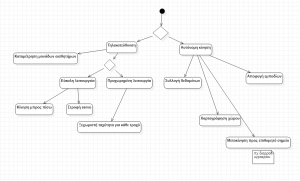
Στοχοι Project
Οι στόχοι που καλύπτονται μέσα από το project είναι οι μαθητές να
- Μελετήσουν τα υπάρχοντα rover που έχει κατασκευάσει η ανθρωπότητα
- Μάθουν την λογική της μηχανικής
- Σχεδιάζουν τρισδιάστατα αντικείμενα και να τα εκτυπώνουν
- Φτιάχνουν κυκλώματα με αισθητήρες, μπαταρίες και διάφορα εξαρτήματα
- Προγραμματίζουν τον μικροελεγκτη Arduino
- Σχεδιάζουν εφαρμογές Android
- Εισέλθουν στην λογική της τεχνίτης νοημοσύνης
Μελέτη υπάρχουσας κατάστασης
 Η χρονιά 2021 θα μείνει στην ιστορία μετά την επιτυχημένη αποστολή του perseverance στον Άρη. Μετά από αρκετούς μήνες ταξιδιού το Rover Percy έφτασε στην επιφάνεια του Άρη για να μελετήσει τα απομεινάρια μιας αρχαίας λίμνης. Λίγα χρόνια πριν, και μερικά χιλιόμετρα μακριά, προσεδαφίστηκε ένα άλλο rover το Curiosity. Όσο ταξιδεύουμε πίσω στο χρόνο θα βρούμε δεκάδες αποστολές σε Ερμή, Αφροδίτη, Άρη, Δία, Κρόνο και Σελήνη η ανθρωπότητα έχει στείλει ρομποτικά μέσα για να εξερευνήσουν το διάστημα.
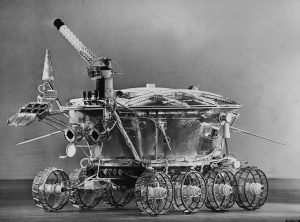
Η χρονιά 2021 θα μείνει στην ιστορία μετά την επιτυχημένη αποστολή του perseverance στον Άρη. Μετά από αρκετούς μήνες ταξιδιού το Rover Percy έφτασε στην επιφάνεια του Άρη για να μελετήσει τα απομεινάρια μιας αρχαίας λίμνης. Λίγα χρόνια πριν, και μερικά χιλιόμετρα μακριά, προσεδαφίστηκε ένα άλλο rover το Curiosity. Όσο ταξιδεύουμε πίσω στο χρόνο θα βρούμε δεκάδες αποστολές σε Ερμή, Αφροδίτη, Άρη, Δία, Κρόνο και Σελήνη η ανθρωπότητα έχει στείλει ρομποτικά μέσα για να εξερευνήσουν το διάστημα. 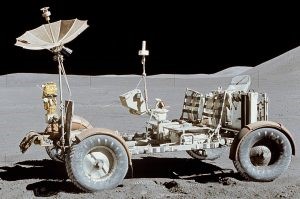 Ένα από τα πιο γνωστά Rover είναι και το LunarRover που βρισκόταν στην αποστολή του Apollo 15 το 1972. Αλλά και το πρώτο Rover, το σοβιετικό Lunokhod01 το οποίο ήταν και το πρώτο Rover που έφτασε στη Σελήνη το 1970.
Ένα από τα πιο γνωστά Rover είναι και το LunarRover που βρισκόταν στην αποστολή του Apollo 15 το 1972. Αλλά και το πρώτο Rover, το σοβιετικό Lunokhod01 το οποίο ήταν και το πρώτο Rover που έφτασε στη Σελήνη το 1970.
Αν φύγουμε από τον κόσμο του διαστήματος θα βρούμε ρομποτικά οχήματα τύπου Rover και στη Γη, τα οποία μελετάνε τελείως διαφορετικά αντικείμενα και βοηθάν την ανθρωπότητα με ποικίλους τρόπους.

Η NASA σε συνεργασία με τον κολοσσό ρομποτικής Boston Dynamics, υλοποιούν μελέτες για την κατασκευή rover (αλλά και ανθρωποειδούς ρομπότ) το οποίο θα μελετά αυτόνομα ανεξερεύνητες και επικίνδυνες για τον άνθρωπο σπηλιές*.

Αντίστοιχες περιπτώσεις rover που συλλέγουν πληροφορίες σε σπηλιές και δύσβατες περιοχές συναντάμε αρκετά συχνά. Αντίστοιχη περίπτωση είναι το Ιαπωνικό KOHGA3 το οποίο μπορεί να ελίσσεται μέσα σε συντρίμμια κτιρίων μετά από σεισμούς για να βοηθήσει στον εντοπισμό ανθρώπων.

Για άλλη μια φορά η NASA σχεδιάζει οχήματα τα οποία θα έχουν την δυνατότητα και να σκαρφαλώνουν σε δύσβατα σημεία όπως βουνοκορφές. Αν και ο σκοπός είναι η αξιοποίησή του στον Άρη, τα οχήματα αυτά θα μπορούσαν να βοηθούν και στη Γη παρέχοντας βοήθεια σε αποκλεισμένους ανθρώπους.
Rover τύπου Nomand, και όχι μόνο, συναντάμε ακόμα και στις παγωμένες εκτάσεις της Αρκτικής τα οποία βοηθούν τους επιστήμονες στην μελέτη του περιβάλλοντος, την εξερεύνηση του χώρου και την συγκέντρωση ευρημάτων.


Ένας όμως από τους σημαντικότερους τομείς αλλά και πιο αναγκαίους στην περίοδο κλιματικής αλλαγής που βρισκόμαστε, είναι η υλοποίηση rover που θα βοηθούν στην παραγωγή και στην γεωργία. Μπορούν να μελετούν το έδαφος, να ρίχνουν λίπασμα ή φάρμακα όπου και αν υπάρχει ανάγκη, να γνωρίζουν πότε, πόσο και που χρειάζεται να ποτιστεί ένα χωράφι και γενικά λειτουργούν με τέτοιο τρόπο ώστε να επιτυγχάνεται η πιο αποδοτική καλλιέργεια με τον οικονομικότερο τρόπο.



Ορισμός προβλήματος
Όπως βλέπουμε και στα παραδείγματα, όσο μελετάμε τον κόσμο της ρομποτικής και συγκεκριμένα των Rover, συναντάμε κολοσσιαίους οργανισμούς όπως η NASA και η Boston Dynamics. αν και η ανθρωπότητα έχει ανάγκη από βοηθούς rover, το έρθει σε επαφή κάποιος με ένα τέτοιο Rover για να το μελετήσει αλλά και να το χρησιμοποιήσει είναι σχεδόν αδύνατο. Το κόστος είναι τεράστιο, αλλά και η υλοποίησή του υπερβολικά περίπλοκη για να το λειτουργήσει ο κάθε ένας.
Περιγραφή λύσης
Σκοπός του συγκεκριμένου project, είναι να υλοποιηθεί ένα prototype ενός οικονομικού Rover το οποίο να μπορεί όποιος θέλει να κατασκευάσει με μικρό σχετικά κόστος και ν το χρησιμοποιήσει ανάλογα τις ανάγκες που έχει. Πρωταρχικός σκοπός είναι η μελέτη και γνώση γύρω από το αντικείμενο έτσι ώστε να ελαττωθεί το χάσμα που υπάρχει αυτή τη στιγμή με τις συγκεκριμένες τεχνολογίες. Το rover μπορεί να το παραμετροποίηση οποιοδήποτε καθώς είναι ανοιχτού κώδικα με σκοπό να εξελίσσεται με τον χρόνο. Στη συνέχεια ιδανικός σκοπός θα ήταν η απευθείας αξιοποίηση του από κάποιον που μπορεί να το έχει ανάγκη, πχ σε κάποιο χωράφι ή σαν εξερευνητή βοηθό.
Ενδεικτικές χρήσεις:
- Αποστολές εξερεύνησης απομακρυσμένων και δυσπρόσιτων περιοχών όπου οι συνθήκες για τον άνθρωπο μπορεί να είναι επικίνδυνες.
- Αξιοποίηση και στην γεωργία καθώς θα μπορεί να κάνει μετρήσεις (υγρασία χώματος, ph, θερμοκρασία κλπ) και ταυτόχρονα θα χαρτογραφεί τα αντίστοιχα σημεία ενός χωραφιού.
- Μια άλλη χρήση του θα ήταν στην βιομηχανία.
- Προσωπικός οικιακός βοηθός.
- Ιδανικά θα μπορούσε να βοηθήσει και στις έρευνες για την ανάπτυξη τεχνολογιών Rover για αποστολές σε άλλους πλανήτες.
Αρχιτεκτονική Rover
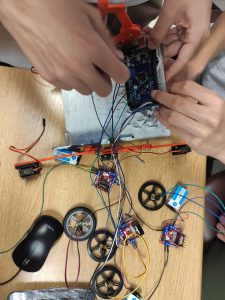
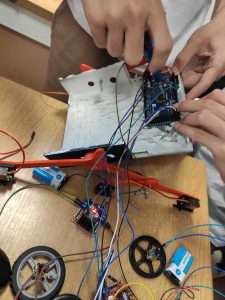
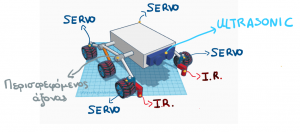
Το Rover θα είναι κατασκευασμένο κυρίως με τρισδιάστατα κομμάτια τα οποία σχεδιάζονται με το Tinkercad και το Blender. Θα αποτελείται από 6 κινητήρες και 4 σέρβο που θα χρησιμοποιηθούν για να στρίβουν τις 4 ρόδες στα άκρα του Rover (2 μπροστά και 2 πίσω) Η σχεδίαση των αξόνων θα επιτρέπει την περιστροφή τους έτσι ώστε να μπορεί να προχωρήσει πάνω σε εξογκώματα και μεγάλα αντικείμενα. Αισθητήρες που θα εντοπίζουν αντικείμενα και απότομους γκρεμούς Στο σασί θα υπάρχουν τα βασικά αντικείμενα όπως
- Arduino mega
- Μπαταρία
- GPS Module
- Αισθητήρας κλίσης
Βασικά χαρακτηριστικά τεχνητής νοημοσύνης
Αποφυγή εμποδίων Αξιοποιώντας αισθητήρες Ultrasonic και IR θα μπορεί να αποφεύγει εμπόδια και γκρεμούς, έτσι ώστε να βρίσκει την ασφαλέστερη διαδρομή. Χαρτογράφηση πορείας Θα αποθηκεύει την διαδρομή έτσι ώστε να γυρίσει πίσω στο αρχικό σημείο κάνοντας την αντίστροφή πορεία. Με την χρήση GPS, θα καταγράφει τα βασικά σημεία που εντοπίζει σε μια περιοχή για να «θυμάται» σε ποιο σημείο είναι τι. Ισχύς τροχών Κάνοντας χρήση αισθητήρων κλίσης θα κατανέμει την ισχύ των κινητήρων αντίστοιχα έτσι ώστε να ξεπεράσει κάποια κοιλότητα του εδάφους Εντοπισμός πηγής (καπνού, υγραερίου, θερμότητάς) Ανάλογα την αποστολή του πχ εύρεση σημείου διαρροής υγραερίου, το Rover θα κατευθύνεται στο σημείου που ο αντίστοιχος αισθητήρας δέχεται μεγαλύτερες τιμές
Επιπρόσθετα modules
Ανάλογα την αποστολή του Rover, θα μπορούμε να τροποποιούμε τους αισθητήρες και τα εξαρτήματά του μεταξύ
- Αισθητήρα θερμοκρασίας
- Αισθητήρα υγραερίου
- Αισθητήρα καπνού
- Αισθητήρα φωτιάς
- Αισθητήρα φωτός
- Βραχίονα – δαγκάνας Μετά την υλοποίηση του, θα προστίθενται και άλλα Modules
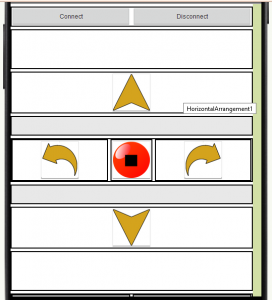
Χειροκίνητη λειτουργία Μέσα από εφαρμογή κινητού ή ταμπλετ θα μπορεί κάποιος να τηλεκατευθύνει το rover
Λίστα προτεινόμενου εξοπλισμού
| Τιμή | Τεμάχια | Τ/Τ | |
| Arduino Mega | 42.0 € | 1 | 42.0 € |
| Breadboard | 4.5 € | 1 | 4.5 € |
| Jumpers F/M | 4.0 € | 1 | 4.0 € |
| Jumpers F/M | 4.0 € | 1 | 4.0 € |
| Driver Module | 2.4 € | 3 | 7.1 € |
| Dc Motors | 3.5 € | 6 | 21.0 € |
| Servo | 4.0 € | 4 | 16.0 € |
| Ultrasonic | 2.0 € | 1 | 2.0 € |
| Tilt Sensor | 2.4 € | 2 | 4.8 € |
| Battery Λιθιου Ιοντων | 13.0 € | 1 | 13.0 € |
| IR Sensor | 2.1 € | 2 | 4.2 € |
| Step-Up Driver | 3.1 € | 2 | 6.2 € |
| GPS | 26.0 € | 1 | 26.0 € |
| Bluetooth | 7.4 € | 1 | 7.4 € |
| Lm35 – Temperature | 1.5 € | 1 | 1.5 € |
| Ldr – Photoresistor | 0.3 € | 1 | 0.3 € |
| Mq2 – Gas sensor | 3.5 € | 1 | 3.5 € |
| Flame Sensor | 2.0 € | 1 | 2.0 € |
| Σύνολο | 169.5 € |
Βασικός Αλγόριθμος
Κύκλωμα
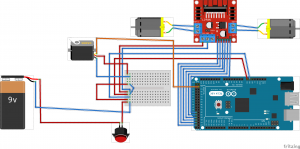
Βασικό κύκλωμα κινητήρων (2 κινητήρες και 1 servo)
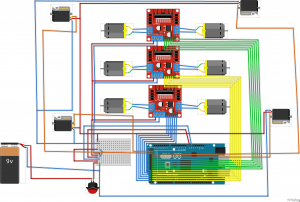
Βασικό κύκλωμα κινητήρων (6 κινητήρες και 4 servo)
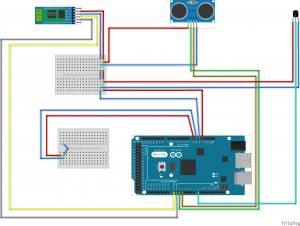
Κύκλωμα αισθητήρων (αντίστοιχα μπορούν να προστεθούν όσοι αισθητήρες και εξαρτήματα χρειάζονται)
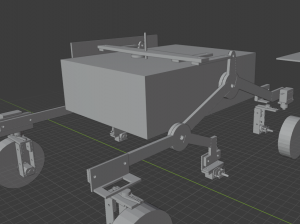
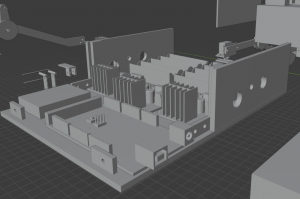
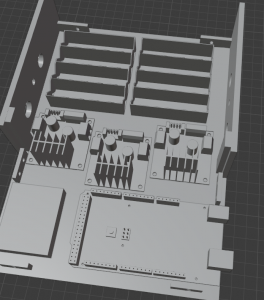
3D Model
Σχεδίαση εφαρμογή Android
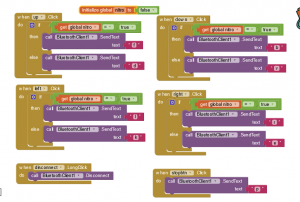
Ο προγραμματισμός, τα 3d αρχεία και τα υπόλοιπα σχέδια βρίσκονται στο github του project
Ενδεικτικό σχέδιο μαθήματος Πολυμορφικό Rover
Διαδικασία υλοποίησης με τους μαθητές