Έξυπνή Ταΐστρα Αδέσποτων Ζώων

ΤΟ ΠΡΟΒΛΗΜΑ
Τα ζητήματα τα οποία αναδείχθηκαν από τους μαθητές και είχαν σχέση με προβλήματα που αντιμετώπιζε η τοπική κοινωνία ήταν: α) η σίτιση των αδέσποτων ζώων και ιδιαίτερα της γάτας και β) η διαχείριση αποβλήτων. Έτσι διαμορφώθηκαν δυο κεντρικά ερωτήματα:
● Πως μπορεί η τεχνολογία να συμβάλει στην σίτιση αδέσποτων ζώων;
● Πως μέσω της τεχνολογίας σε επίπεδο σχολικής μονάδας μπορεί να γίνει διαχείριση αποβλήτων;
Η ΛΥΣΗ
Μετά από καταιγισμό ιδεών η απάντηση που διαμορφώθηκε για τα δύο κεντρικά ερωτήματα ήταν η δημιουργία μιας έξυπνης ταΐστρας αδέσποτων ζώων η οποία θα στηρίζεται σε ανακυκλωμένα υλικά και με τη βοήθεια μικροϋπολογιστή Arduino και των κατάλληλων αισθητήρων, θα τα μετατρέπει σε έξυπνες συσκευές που θα ικανοποιούν τις ανάγκες της κεντρικής ιδέας.
ΠΕΡΙΓΡΑΦΉ ΚΑΙ ΣΧΈΔΙΟ
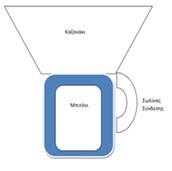
Υποθέσαμε ότι είναι δυνατόν στην απορροή από το καζανάκι να προσαρμοσθεί ο αυτοματισμός ο οποίος θα αποτελείται από μια πλακέτα arduino, ένα αισθητήρα κίνησης HC-SR04 και ένα Servo. Όταν το ζώο πλησιάζει σε προκαθορισμένη απόσταση από τον αισθητήρα τότε ανοίγει αυτόματα το πώμα της ταΐστρας, για συγκεκριμένο χρονικό διάστημα, έτσι ώστε να πέσει επαρκής ποσότητα τροφής.
ΤΑ ΥΛΙΚΑ




ΤΟ ΚΎΚΛΩΜΑ

H ΣΥΝΘΕΣΗ ΤΟΥ ΚΥΚΛΩΜΑΤΟΣ
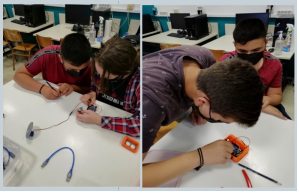

H ΚΑΤΑΣΚΕΥΗ

TO ΦΙΛΟΤΕΧΝΗΜΑ ΤΗΣ ΚΑΤΑΣΕΥΗΣ

Ο ΑΛΓΟΡΙΘΜΟΣ
ΑΛΓΟΡΙΘΜΟΣ ΤΑΪΣΤΡΑ
CHEK<–0
ΕΝΑΡΞΗ<–ΑΛΗΘΗΣ
ΟΣΟ ΕΝΑΡΞΗ = ΑΛΗΘΗΣ ΕΠΑΝΕΛΑΒΕ
ΑΝ HC_D9<40 Cm ΤΟΤΕ
CHEK<–1
SERVO_0<–0
Ι<–0
ΓΙΑ Ι ΑΠΟ 1 ΜΕΧΡΙ 180 ΕΠΑΝΕΛΑΒΕ
Servo_0= servo_0+1
ΤΕΛΟΣ ΕΠΑΝΑΛΗΨΗΣ
ΚΑΘΗΣΤΕΡΗΣΗ 3000 milliseconds
ΓΙΑ Ι ΑΠΟ 1 ΜΕΧΡΙ 180 ΕΠΑΝΕΛΑΒΕ
Servo_0= servo_0-1
ΤΕΛΟΣ ΕΠΑΝΑΛΗΨΗΣ
ΤΕΛΟΣ ΑΝ
ΑΝ CHEK=1 TOTE
ΚΑΘΗΣΤΕΡΗΣΗ 500000 milliseconds
CHEK<–0
ΤΕΛΟΣ ΑΝ
ΤΕΛΟΣ ΕΠΑΝΑΛΗΨΗΣ
ΤΕΛΟΣ ΑΛΓΟΡΘΙΘΜΟΥ ΤΑΪΣΤΡΑ
Ο ΚΩΔΙΚΑΣ ΣΕ MINIBLOG
#include <mbq.h>
#include <PingIRReceiver.h>
void setup()
{
initBoard();
float chek = 0;
while(true)
{
if((hcsrMeasureCM(D9)<40))
{
chek = 1;
DigitalWrite(D13_LED, true);
servo0.attachAndWrite(0);
for(unsigned int _i=0; _i<(unsigned int)(180); _i++)
{
servo0.attachAndWrite((servo0.read()+1));
delay(15);
}
delay(3000);
for(unsigned int _i=0; _i<(unsigned int)(180); _i++)
{
servo0.attachAndWrite((servo0.read()-1));
delay(15);
}
DigitalWrite(D13_LED, false);
}
else
{
}
if(((int)(chek)==(int)(1)))
{
delay(500000);
chek = 0;
}
else
{
}
}
}
void loop()
{
ΤΟ ΤΕΛΙΚΟ ΑΠΟΤΕΛΕΣΜΑ

BINTEO ΠΑΡΟΥΣΙΑΣΗΣ ΚΑΝΤΕ ΚΛΙΚ ΕΔΩ
Η εργασία στο αποθετήριο του github : https://github.com/gympiecemaker/gymlivd
Τα μέλη της ομάδας «PieceMaker»:
Οι μαθητές: Δέσποινα Δήμου, Σοφία Καβαλέρη, Χρήστος Λαγηνάς, Ανδρέας Κάντζος, Γιάννης Μόσχοβας, Ελευθερία Εγγλέζου, Μαριάννα Διαματάρη, Γιώργος Μαρκάκης, Γιάννης Φράγκος, Χίλντα Γιαννάκη
Ο εκπαιδευτικός: Χαβιάς Νικόλαος ΠΕ(86)