
Έρευνα
- Μελέτης υπάρχουσας κατάστασης.
Εικόνες από προαύλια σχολείων με απορρίμματα μετά από διαλείμματα είναι πολύ συνηθισμένες, αφού σε αυτά καθημερινά συγκεντρώνονται μεγάλος αριθμός ατόμων(μαθητών) και είναι φυσικό να δέχονται συνεχώς μεγάλο αριθμό απορριμμάτων. Όμως τα απορρίμματα στο προαύλιο ενός σχολείου, πέρα από μια άσχημη αισθητικά εικόνα, δημιουργούν πρακτικά προβλήματα αλλά και υγειονομικούς κινδύνους για τα άτομα που χρησιμοποιούν τους χώρους αυτούς
- Σαφής ορισμός προβλήματος – ανάγκης
Ο καθαρισμός από τον υπάλληλο καθαριότητας του σχολείου μια φορά τη ημέρα συνήθως δεν φτάνει, αφού η ανάγκη για καθαρισμό του προαύλιου είναι συνεχής ( μετά από κάθε διάλλειμα).Όμως η συνεχή φυσική παρουσία υπαλλήλου καθαριότητας για τον καθαρισμό του προαυλίου είναι πολλές φορές αδύνατο αλλά και πολύ δαπανηρό.
3.Ιδέα
Για την πρακτική επίλυση αυτού του προβλήματος θα κατασκευάσουμε ένα αυτοκινούμενο όχημα που θα μαζεύει τα απορρίμματα από το προαύλιο. Το όχημα θα είναι προγραμματισμένο (arduino) κατάλληλα ώστε να κινείται στο χώρο αυτόματα και συνεχώς αποφεύγοντας τα εμπόδια. Όταν θα εντοπίζει απορρίμματα θα τα τοποθετεί σε έναν κάδο(μακετόχαρτο) που θα είναι προσαρμοσμένος επάνω του, με την βοήθεια κατάλληλα διαμορφωμένων βραχιόνων. Οι βραχίονες θα είναι από ξύλο και θα κινούνται με την βοήθεια προγραμματισμένων ηλεκτρικών κινητήρων servo. Το όχημα θα τροφοδοτείται με ηλεκτρική ενέργεια από δυο επαναφορτιζόμενες μπαταρίες 3.6 volt. Τέλος το όχημα θα έχει την δυνατότητα να ελέγχεται από απόσταση με την βοήθεια wifi control ( HC05 bluetooth module).
4. ΚΟΣΤΟΣ ΚΑΤΑΣΚΕΥΗΣ
| ΥΛΙΚΑ | ΤΕΜΑΧΙΑ | ΚΟΣΤΟΣ/ΤΕΜ. | ΚΟΣΤΟΣ(ευρώ) | |
| 1 | Ηλεκτρικά μοτέρ με encoder (Dual shaft gear motors) | 4 | 16,00 | 16,00 |
| 2 | Πλαστικούς τροχούς 65mm με τα ελαστικά τους | 4 | ||
| 3 | Πλατφόρμες βάσης από ακρυλικό (plexiglass) 3 mm | 2 | ||
| 4 | Στηρίγματα βάσης από ακρυλικό με τις βίδες τους | 8 | ||
| 5 | Αισθητήρες υπερήχων (αισθητήρας απόστασης) HC-SR04 | 1 | 2,50 | 2,50 |
| 6 | Ξύλο μπάλσα 5x5x100cm | 1 | 1,00 | 1,00 |
| 7 | Πλαστική δαγκάνα με servo κινητήρα | 2 | 7,90 | 15,80 |
| 8 | Servo motor (περιστροφής 360ο ) | 4 | 5,90 | 23,60 |
| 9 | Μικροεπεξεργαστή arduino | 1 | 22,00 | 22,00 |
| 10 | Καλώδια ( σε μέτρα) | 8 | 1,00 | 8,00 |
| 11 | Μακετόχαρτο 100Χ70cm / πάχους 5mm | 1 | 2,50 | 2,50 |
| 12 | Επαναφορτιζόμενες μπαταρίες λιθίου 3.6v | 2 | 2,20 | 4,40 |
| 13 | Μπαταριοθήκη | 1 | 0,40 | 0,40 |
| 14 | Πλακέτα ελέγχου ηλεκτρικού μοτέρ (DC Motor Driver L298) | 1 | 5,90 | 5,90 |
| 15 | Wifi control ( HC05 bluetooth module) | 1 | 6,80 | 6,80 |
| 108,90 |
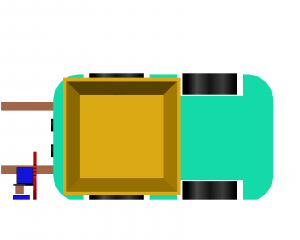
5. ΣΧΕΔΙΑ
α) ΚΑΤΟΨΗ
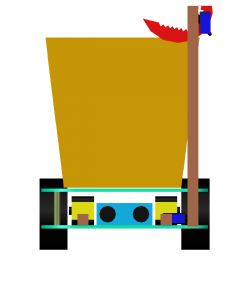
β)ΠΡΟΣΟΨΗ
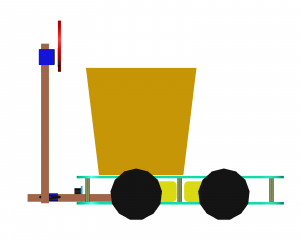
γ)ΠΛΑΓΙΑ ΟΨΗ
6. arduino code
#include<Servo.h>
int IN3=7;
int IN4=6;
int IN1=9;
int IN2=8;
int SPEED=210;
int trigPin=11;
int echoPin=12;
int duration;
int distance;
int servoPin1=2;
Servo s1;
int servoPin2=3;
Servo s2;
void setup() {
// put your setup code here, to run once:
s1.attach(servoPin1);
s2.attach(servoPin2);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
Serial.begin(9600);
s2.write(0);
s1.write(0);
}
void loop() {
// put your main code here, to run repeatedly:
digitalWrite(trigPin, LOW);
delay(20);
digitalWrite(trigPin, HIGH);
delay(50);
digitalWrite(trigPin, LOW);
duration=pulseIn(echoPin, HIGH);
distance=duration*0.034/2;
s2.write(2);
s1.write(2);
if (distance>=49){
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
s2.write(2);
s1.write(2);
}
if (distance<49){
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
delay(300);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
s1.write(150);
delay(2000);
s2.write(150);
delay(300);
s1.write(0);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
delay(1000);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
delay(300);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
}
}
7) VIDEOS
https://github.com/Robotic-team-gym-21/project_1