ΗΛΙΑΤΟΡΕΣ
ΓΕΛ ΚΙΣΑΜΟΥ-ΕΠΑΛ ΚΙΣΑΜΟΥ
α. Μελέτη υπάρχουσας
κατάστασης
Τα φωτοβολταϊκά συστήματα-φωτοβολταϊκά πάνελ που λειτουργούν στη πλειονότητά τους είναι στατικά δηλαδή δεν στρέφονται προς τον ήλιο και έτσι σύμφωνα με τις πηγές μας έχουν απώλεια τουλάχιστον 20% ενεργειακά.
β.Σαφής ορισμός
προβλήματος – ανάγκης
Όμως ο ήλιος αποδίδει τα μέγιστα μόνο όταν «πέφτει» κάθετα στο πάνελ, έτσι ψάχνουμε τρόπο να ακολουθεί το πάνελ τις ακτίνες του ήλιου. Ένας τρόπος παρακολούθησης του είναι με φωτοευαίσθητες αντιστάσεις οι οποίες παρακολουθούνται από τον μικροελεγκτή arduino και με 2 servo ο μικροελεγκτής προσαρμόζει το πάνελ ώστε οι ακτίνες να πέφτουν κάθετα.
ΛΙΓΑ ΛΟΓΙΑ ΓΙΑ ΤΗΝ ΠΕΡΙΠΕΤΕΙΑ ΤΗΣ ΚΑΤΑΣΚΕΥΗΣ ΜΑΣ
Η αναζήτηση άρχισε με σκοπό τη κατασκευή ενός solar tracker όπως https://www.instructables.com/id/Building-an-Automatic-Solar-Tracker-With-Arduino-N/.
ΟΜΩΣ όλες αυτές οι κατασκευές είναι για εσωτερικό χώρο και για λόγους επίδειξης(είναι light tracker) και όχι για ένα πραγματικό solar tracker.
γ.Ορισμός προτεινόμενης λύσης-πρωτοτυπία διαφοροποίησης
Και εδώ μπήκαμε στην μεγάλη περιπέτεια κατασκευής ενός πραγματικού solar tracker και ως φυσική συνέπεια (ο καθηγητής μας είναι φυσικός και του αρέσει η αστροφυσική) και solar path finder- επιστημονικό εργαλείο εύρεσης των γωνίων που διαγράφει ο ΗΛΙΟΣ στην περιοχή μας.
Και ανασχεδιάσαμε το έργο μας έτσι ώστε να καλύπτει τις γωνίες που διαγράφει ο ήλιος στην περιοχή μας -μια πλήρης μελέτη της κίνησης του Ήλιου βρίσκεται στο github ως sunpath ( power point).
SOLAR PATH FINDER AND SOLAR TRACKER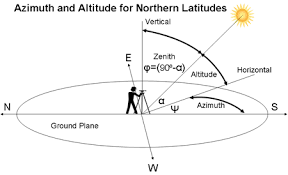
Υλικά (τελικός απολογισμός) :
1.arduino uno (https://grobotronics.com/funduino-uno-rev3-arduino-uno-compatible.html) = € 11.90
2. 4 ldr (https://grobotronics.com/photo-resistor-ldr-5mm.html)=4*0,20=€ 0,80
3. *2 servo (link: https://grobotronics.com/servo-small-5kg.cm-metal-gears-with-analog-feedback-feetech-fs9225m.html
https://grobotronics.com/analog-feedback-micro-servo-plastic-gear.html
)=€9.90+€12.20=€21,10
4.wires (https://grobotronics.com/jumper-wires-15cm-female-to-male-pack-of-10.html ΚΑΙ https://grobotronics.com/jumper-wires-15cm-male-to-male-pack-of-10.html)=2*€1.80=€ 3,30
5..breadboard (link: https://grobotronics.com/breadboard-400-tie-point-white-half-size.html ) =€3.20
6.Bluetooth Module for Arduino – HC05 (https://grobotronics.com/bluetooth-module-for-arduino-hc05.html) =€6.80
7. 4 αντιστάσεις 1kohm (https://grobotronics.com/carbon-1-4w-5-1kohm.html) = €0,04
8.servo arm(https://grobotronics.com/servo-arm-double-5cm-horn-spline-25t.html)=€1.90
9. Βίδα 4mm με μήκος 9cm =€0.10
10.Πλαστικά γρανάζια απο 3D εκτυπωτή του εκφέ χανίων (ΤΑ STL ΑΡΧΕΙΑ ΠΕΡΙΛΑΜΒΑΝΟΝΤΑΙ ΩΣ ST1,ST2,..)
ΕΝΔΕΙΚΤΙΚΟ ΣΥΝΟΛΟ=€49,00
Δοκιμάσαμε σε εξωτερικό χώρο το ηλιακό πάνελ-https://grobotronics.com/solar-panel-3.5w-165x135mm.html-πάνω στο solar tracker μας, το οποίο φόρτιζε εύκολα ένα smartphone.
SOFTWARE
1)ARDUINO IDE
2)TINKERCAD-ONLINE 3D DESIGNERhttps://www.tinkercad.com/
ΕΡΓΑΛΕΙΑ
1)Κατσαβίδι-στραβοκατσάβιδο
2)Χαρτοκόπτης για την αφαίρεση ατελειών απο τα 3D εξαρτήματα.
ΤΕΛΙΚΑ ΠΕΡΙΓΡΑΦΗ ΠΡΟΒΛΗΜΑΤΟΣ Η εποχή μας απαιτεί μεγάλα ενεργειακά αποθέματα , έτσι ένα αποδοτικό φωτοβολταικό πάνελ που ακολουθεί τον ήλιο μας δείχνει τον δρόμο στους κατασκευαστές φωτοβ.συστημάτων.Πόσο μάλλον όταν το πρότζεκτ μας καταγράφει τις γωνίες που δημιουργεί ο ήλιος στο στερέωμα στο καστέλι κισάμου και έτσι δείχνει ανα ημέρα και ώρα την κατάλληλη γωνία που πρέπει να έχει το φ. πάνελ για μέγιστη απόδοση. Μια επιστημονική εργασία αυτού του είδους εκπαιδεύει τους μελλοντικούς επιστήμονες στο διαθεματικό πλαίσιο STEM-Θετικές επιστήμες-Ρομποτική. Ακολουθώντας το μονοπάτι του Ήλιου.Σε συνέχεια της προηγούμενης απάντησης η ιδέα μας είναι να κατασκευάσουμε ένα ηλιακό ανιχνευτή της πορείας του ήλιου που θα προσαρμόζει το φωτοβολταικό πάνελ μας κάθετα στις ακτίνες του ήλιου για να έχει την μέγιστη απόδοση και ταυτόχρονα θα καταγράφει τις γωνίες αυτές.Θα χρησιμοποιήσουμε 4 ldr φωτοαντιστάσεις-οι αισθητήρες φωτός που ανάλογα με το φως που λαμβάνουν θα δίνουν εντολή να στραφεί το πάνελ μας στη σωστή θέση- 2 σερβομηχανισμούς για να εκτελούν τις παραπάνω εντολές και θα αποτελούν συνάμα αισθητήρες κλίσης* για την καταγραφή αυτών των γωνιών. Φυσικά και arduino που είναι ο εγκέφαλος της κατασκευής μας. 3D εκτυπωμένα εξαρτήματα θα δώσουν σταθερότητα και αποδοτικότητα στην κατασκευή μας.
*(Με 3D εξαρτήματα φτιάξαμε δύο πανομοιότυπες κατασκευές . Η πρώτη-link https://github.com/nektarios25ma/Solar-tracker/tree/master3- χρησιμοποιεί ανεξάρτητο αισθητήρα κλίσης 9-axis MEMS sensor με έξτρα MCU για να δίνει τις κλίσεις και η δεύτερη πιο λιτή με αισθητήρες κλίσεις τα ίδια τα σέρβο* έχει επιπρόσθετα το πλεονέκτημα ότι μπορεί να ακολουθήσει-καταγράψει όλες τις γωνίες που διαγράφει ο ήλιος κατά την διάρκεια του χρόνου γι αυτό έχει ανασχεδιασμένα όλα τα 3D εξαρτήματα από την ομάδα μας. Γι αυτό αυτήν επιλέξαμε να παρουσιάσουμε ως κύρια κατασκευή )
ΚΑΤΑΣΚΕΥΗ
Τα σχεδιασμένα 3d εξαρτήματα απο την ομάδα μας θα τα βρείτε ως stl αρχεία στο github.Τα servo που είναι στη λίστα μας “κουμπώνουν” ακριβώς στα παραπάνω εξαρτήματα.
Το servo : https://grobotronics.com/servo-small-5kg.cm-metal-gears-with-analog-feedback-feetech-fs9225m.html

“κουμπώνει” στο 3d εξάρτημα base.stl (ή stl 1)-στην υποδοχή που βλέπετε,
Πάνω στο servo βάζουμε το servo arm (https://grobotronics.com/servo-arm-double-5cm-horn-spline-25t.html)  .
.
ΟΠΩΣ ΣΤΗΝ ΕΙΚΟΝΑ 1
ΕΙΚΟΝΑ1:

Πάνω στο servoarm βιδώνουμε το 3d εξάρτημα panel-mount.stl (ή stl2)
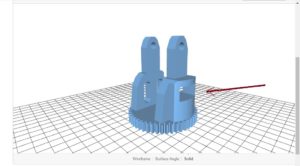
και τοποθετούμε το 2ο servo (εκεί που δείχνει το βέλος)
στο κατάλληλο άνοιγμα του panel-mount.stl, όπως την εικόνα 2:
Εικόνα 2

Στο 2ο servo βιδώνουμε το Vertical_Servo_Gear.stl (ή stl5, το άσπρο στην εικόνα2 )
όπως στην εικόνα 2.
Στο Panel_Bracket2.stl(ή stl4)

τοποθετούμε το LDR DIVIDER HIGH.stl(ή stl3) εκεί που δείχνει το βέλος (έχει υποδοχή να το δεχτεί και ας μην φαίνεται στην πανω εικόνα).
LDR DIVIDER HIGH.stl:
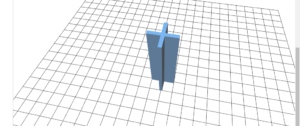
Τέλος με την κατάλληλη βίδα 4mm με μήκος 9cm και τα αντίστοιχα παξιμάδια τοποθετούμε το Panel_Bracket2.stl όπως στην εικόνα 2.
Η συνδεσμολογία πρέπει να γίνει όπως (κύκλωμα)
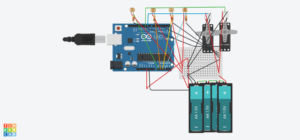
Και το bluetooth hc-05-σύνδεση το παραθέτουμε σε άλλη εικόνα γιατί το tinkercad-circuit απο το οποίο φτιάξαμε την πάνω εικόνα δεν διαθέτει bluetooth στοιχείο

ΟΛΑ TA ΑΡΧΕΙΑ ΒΡΙΣΚΟΝΤΑΙ ΣΤΟ GITHUB ΜΕ ΜΕΓΑΛΥΤΕΡΗ ΑΝΑΛΥΣΗ.
Έπειτα έπρεπε να βαθμονομήσουμε τα servo ώστε να μετράνε την σωστή γωνία και σε αυτήν την επίπονη διαδικασία βοήθησε το 2ο link(δες το αρχείο στο github –διαδικασία βαθμονόμησης που εξηγήται αναλυτικά).
Ο διαιρέτης τάσης που φαίνεται στο κύκλωμα που βρίσκεται στο github (και παραπάνω) λειτούργησε καλά τελικά σε εξωτερικό χώρο με αντιστάσεις 1 kohm(4 αντιστάσεις).Ανάλογα με την συμπεριφορά των ldr διαλέγουμε(πειραματικά) αντίστοιχες αντιστάσεις έτσι ώστε σε εξωτερικό χώρο να λειτουργούν ικανοποιητικά.
ΒΙΒΛΙΟΓΡΑΦΙΚΕΣ ΑΝΑΦΟΡΕΣ
- https://en.wikipedia.org/wiki/Sun_path 2)https://en.wikipedia.org/wiki/Position_of_the_Sun 3)https://www.youtube.com/watch?v=lJVEubm9Ja8 4)https://www.instructables.com/id/Arduino-Solar-Tracker/
- LINK ΠΟΥ ΒΟΗΘΗΣΕ ΣΤΗΝ ΒΑΘΜΟΝΟΜΗΣΗ-CALIBRATION SERVO* : https://dronebotworkshop.com/analog-feedback-servo-motor/
Ο ΒΑΣΙΚΟΣ ΑΛΓΟΡΙΘΜΟς ΒΡΙΣΚΕΤΑΙ ΣΤΟ GITHUB ΟΜΩΣ Η ΛΟΓΙΚΗ ΛΕΙΤΟΥΡΓΙΑΣ ΤΟΥ ΠΕΡΓΡΑΦΕΤΑΙ ΠΑΡΑΚΑΤΩ
(πάτα-κλίκαρε πάνω)
Επίσης χρησιμοποιήθηκαν βοηθητικά προγράμματα για την βαθμονόμηση των servo*.
ΣΤΟ LINK* ΠΟΥ ΑΚΟΛΟΥΘΕΙ ΚΑΙ ΑΝΗΚΕΙ ΟΠΩΣ ΚΑΙ ΔΗΜΙΟΥΡΓΗΘΗΚΕ ΑΠΟ ΤΗΝ ΟΜΑΔΑ ΤΩΝ ΜΑΘΗΤΩΝ ΠΟΥ ΕΡΓΑΣΤΗΚΕ ΓΙ ΑΥΤΟ ΤΟ PROJECT ΕΙΝΑΙ ΤΟΠΟΘΕΤΗΜΕΝΑ ΟΛΑ ΤΑ ΑΡΧΕΙΑ ΠΟΥ ΕΙΝΑΙ ΑΝΑΓΚΑΙΑ ΓΙΑ ΤΗΝ ΚΑΤΑΝΟΗΣΗ ΚΑΙ ΚΑΤΑΣΚΕΥΗ ΑΝΑΛΟΓΟΥ ΕΓΧΕΙΡΗΜΑΤΟΣ LINK: https://github.com/Ampirath/Solar-Tracker
ή το ταυτόσημο https://github.com/nektarios25ma/Solar-tracker
(branch master τα άλλα branch είναι υπο εξέλιξη και δεν αφορούν προς το παρόν τον διαγωνισμό της ΕΛΛΑΚ)
LINK VIDEO ΠΟΥ ΦΤΙΑΧΤΗΚΕ ΑΠΟ ΤΑ ΠΑΙΔΙΑ: https://www.youtube.com/watch?v=emRvdH7JC2I&t=79s

Η ομάδα μας αποτελείται απο 3 μαθητές του ΓΕΛ Κισάμου β λυκείου . ΑΘΗΝΑ ΑΘΑΝΑΣΑΚΗ, ΣΤΕΛΛΑ ΑΜΠΟΥΧΑΝΗ ΚΑΙ ΣΠΥΡΟΣ ΕΙΡΗΝΑΚΗΣ Τα κορίτσια είναι οι προγραμματίστριες του arduino και ο Σπύρος το πρακτικό μυαλό. Ο Σπύρος βοήθησε και στο 3D σχεδιασμό εξαρτημάτων(Βέβαια οι απαιτήσεις του έργου ήταν να αναμιχθούν όλοι σε όλα τα στάδια της κατασκευής).