
Γενικό Πρόβλημα
Τα περισσότερα λαχανικά που μπορεί κανείς να προμηθευτεί παράγονται σε θερμοκήπια, τα οποία λειτουργούν με όλο και περισσότερες αυτοματοποιημένες διαδικασίες. Βέβαια, τα τελευταία χρόνια παρατηρείται μία αύξηση των μικρών και των καλλιεργήσιμων εκτάσεων ακόμα και σε αστικές περιοχές. Και καθώς όλο και περισσότερος κόσμος ενδιαφέρεται για τον τρόπο με τον οποίο παράγεται η πρώτη ύλη, πολλοί αρχίζουν να δημιουργούν μικρούς κήπους στις αυλές των σπιτιών τους, ώστε να παράγουν τα δικά τους λαχανικά. Εκεί λόγω κόστους αλλά και πολύ περιορισμένων επιλογών δεν έχουν εφαρμοστεί στον ίδιο βαθμό αυτόματες διαδικασίες. Όμως αυτές είναι απαραίτητες καθώς οι περισσότεροι δεν έχουν αρκετό χρόνο να διαθέσουν και δεν έχουν και τις απαραίτητες γνώσεις για να περιποιηθούν κατάλληλα τα φυτά τους.
Βέβαια, δίπλα στα φυτά είναι πολύ κοινό να εμφανίζονται ζιζάνια, τα οποία το δυσκολεύουν από το να μεγαλώσει. Για τον λόγο αυτό είναι απαραίτητο να καταπολεμηθούν. Οι τρόποι καταπολέμησης τους είναι είτε με το ράντισμα τους με ζιζανιοκτόνα, πρακτική που συνηθίζεται για μεγάλες εκτάσεις, είτε με το ξερίζωμα τους από το έδαφος για μικρότερες εκτάσεις. Μια νέα έρευνα υποστηρίζει ότι το απλό κούρεμα του ζιζανίου είναι πιο αποδοτικό από το ξερίζωμα του, καθώς στις ρίζες του ζιζανίου διατηρούνται συστατικά αρκετά θρεπτικά για το φυτό.
Η λύση μας
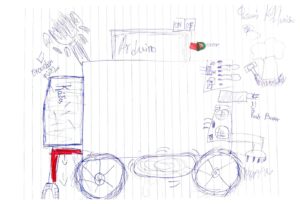
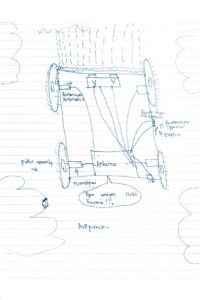
Η ιδέα μας ήταν η κατασκευή ενός αυτόνομου οχήματος για την αποψίλωση των ζιζανίων και την διαχείριση κήπων ή μικρών εκτάσεων. Πέρα από την αποψίλωση των φυτών το ρομπότ λαμβάνει επίσης σημαντικές μετρήσεις από το έδαφος και ρυθμίζει ανάλογα το πότισμα των φυτών. Το ξεχορτάριασμα γίνεται μέσω ειδικού μηχανισμού ο οποίος κόβει τις άκρες από τα χόρτα αντί να τα βγάζει από το έδαφος. Επίσης, μέσω κατάλληλου αισθητήρα το ρομπότ είναι σε θέση να μετράει την υγρασία του εδάφους γύρω από το κάθε φυτό. Μετά από επεξεργασία των δεδομένων αυτών ρυθμίζει ανάλογα τη συσκευή αυτόματου ποτίσματος των φυτών στέλνοντας σε αυτό το κατάλληλο μήνυμα.
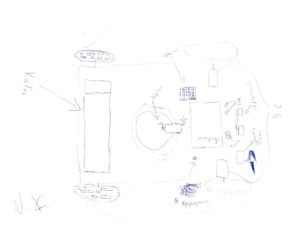


Τρόπος Λειτουργίας

- Στον κήπο έχουμε φυτέψει φυτά σε σειρές.
- Ανάμεσα στις σειρές αλλά και μεταξύ των φυτών υπάρχει ικανή απόσταση ώστε να μπορεί να περάσει το ρομπότ.
- Μπροστά από κάθε φυτό υπάρχει ένα ταμπελάκι στο ύψος του πλαϊνού αισθητήρα απόστασης, που χρησιμεύει ώστε το ρομπότ να ανιχνεύσει το κάθε φυτό.
Αλγόριθμος
- Ενεργοποιείται ο dc κινητήρας του κοπτικού.
- Προχωράμε μπροστά.
- Αν ο δεξιά ultrasonic δει ένα αντικείμενο (ταμπελάκι φυτού) σε απόσταση 45cm,
- Τότε στρίβει δεξιά.
- Προχωράει μπροστά μέχρι να βρει το φυτό.
- Έπειτα μετράει την υγρασία εδάφους.
- Παίρνει απόφαση για το εάν το φυτό θέλει πότισμα.
- Όταν τελειώσει την διαδικασία αυτή επιστρέφει στη θέση του, στην κεντρική λεωφόρο.
- Αφού κάνει την διαδικασία αυτή σε όλα τα λουλούδια μιας σειράς και φτάσει στο τέλος της κεντρικής λεωφόρου κάνει αναστροφή.
- Αν δει εμπόδιο περιμένει δέκα δευτερόλεπτα και ξαναελέγχει.
- Αν το εμπόδιο έχει απομακρυνθεί τότε το ρομπότ συνεχίζει ευθεία.
- Αν το εμπόδιο παραμένει στο σημείο τότε το ρομπότ κάνει κίνηση ώστε να περάσει γύρω από το εμπόδιο.



Υλικά κατασκευής (και ενδεικτικές τιμές)
- (x1) Arduino Uno – 15 €
- (x1) Σασί ρομπότ – 15 €
- (x3) Κινητήρες DC – 15 €
- (x1) Σερβοκινητήρας – 10 €
- (x2) Αισθητήρας Απόστασης Ultrasonic – 6 €
- (x1) Αισθητήρας Υγρασίας Εδάφους – 2 €
- (x2) Βάση Ultrasonic – 2 €
- (x1) LCD Οθόνη – 5 €
- (x1) Motor Driver – 4 €
- (x2) Μπαταρία 9V- 2€
- (x1) Μονωτική Ταινία – 1 €
ΣΥΝΟΛΟ: 77 €
Εξοπλισμός που χρησιμοποιήθηκε
- 3D Εκτυπωτής
- Πιστόλι Σιλικόνης
- Κολλητήρι
- Πολύμετρο
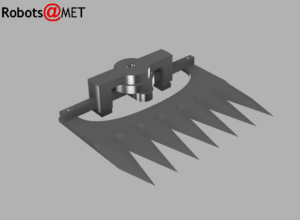
3D Σχέδια
Βήματα για την κατασκευή
- Προσαρμόζουμε το Arduino και το breadboard στο σασί.
- Ομοίως προσαρμόζουμε τους αισθητήρες ultrasonic και την οθόνη στο σασί και τα συνδέουμε στο Arduino.
- Τυπώνουμε στον 3D Printer τα σχέδια για τον μηχανισμό κοπής των ζιζανίων και τον μηχανισμό μετακίνησης του αισθητήρα υγρασίας εδάφους.
- Προσαρμόζουμε τα δύο εκτυπωμένα κομμάτια στην μπροστινή πλευρά και στην πίσω πλευρά του σασί αντίστοιχα.
- Συνδέουμε τους κινητήρες με τον motor driver και στη συνέχεια αυτόν με το Arduino.
- Με χρήση μονωτικής ταινίας κολλάμε στο σασί τα καλώδια.
- Περνάμε τον κώδικα στο Arduino από το GitHub.
- Είμαστε έτοιμοι να δοκιμάσουμε το ρομπότ.
Χρήσιμοι Σύνδεσμοι
Η ομάδα μας
Η ομάδα μας αποτελείται από μικρούς ρομποτιστές, μαθητές Δημοτικών σχολείων της Πάτρας, μέλη της δράσης εκπαιδευτικής ρομποτικής “Robots@ΜΕΤ” του Πανεπιστημίου Πατρών.
Μέλη Ομάδας:
- Δέμης Σπύρος – Ε’ Δημοτικού
- Καλλιανέζου Φωτεινή – ΣΤ’ Δημοτικού
- Κουστουμπάρδης Διονύσης – Ε’ Δημοτικού
- Κουστουμπάρδης Νικόλας – ΣΤ’ Δημοτικού
- Πετροπούλου Πηνελόπη – ΣΤ’ Δημοτικού
Προπονητές:
Ανατολιωτάκης Νίκος – Υποψήφιος Διδάκτορας ΗΜΤΥ
Τζουβελέκης Δημήτρης – Φοιτητής ΜΜΑΜ
